 图 1 调高系统的机械结构
Fig.1 Mechanical structure of height adjustment system
图 1 调高系统的机械结构
Fig.1 Mechanical structure of height adjustment system
Xu Liang,Chen Hongyao.Optimized shearer drum height adjustment control strategy of improved ant colony algorithm[J].Journal of Heilongjiang University of Science & Technology,2023,33(02):214-220.[doi:10.3969/j.issn.2095-7262.2023.02.012]

采煤机是综采工作面中的最核心装备,其自动化和智能化是无人采煤工作面的关键。采煤机在截割、落煤过程中,煤层地质条件复杂,要求能快速、精准地根据煤岩分界自动调节滚筒高度,从而提高采煤回收率。由于采煤机滚筒调高系统存在着负荷、惯性较大,导致调高响应速度慢、精准度低等问题[1-4]。
PID控制在工业控制中应用最为广泛,众多学者通过优化PID参数,研究采煤机调高控制。汪亮培[5]建立采煤机电液比例调高系统模型,采用单个神经元与PID相结合的控制策略进行控制。毛君等[6]采用一种新型萤火虫算法对PID控制器进行优化,优化后的控制器与常规PID控制器相比,具有更好的控制性能。在响应速度、稳定性、鲁棒性等方面均有提高。赵丽娟等[7]使用模糊PID 控制器实现对采煤机的调高控制,其控制效果在响应速度、稳定性、鲁棒性等方面均优于常规PID控制。随着深度神经网络、强化学习等人工智能理论的发展,采煤机调高控制策略的研究得到更深层次的推进。刘春生等[8]运用灰度关联算法,在液压缸的阀门开关控制特性的基础上,提出了一种记忆程控截割技术用于滚筒自动调高。王忠宾等[9]基于记忆切割技术,将人工免疫理论应用于采煤机滚筒自适应调高控制系统。樊启高等[10]提出将动态模糊神经网络与采煤机调高机构运动学模型相结合,对采煤机进行自动调高控制。王雅东等[11]利用深度强化学习算法及虚拟样机技术,搭建了采煤机调高机-液-电一体化系统,实现了采煤机滚筒的自适应调高。
针对采煤机调高系统存在的诸多问题,笔者采用结构简单、响应速度快、鲁棒性和可靠性高的PID控制器作为采煤机滚筒调高控制系统的主控器,PID控制器的参数(KP、KI、KD)采用改进的蚁群算法寻优,通过仿真验证可以有效地解决采煤机滚筒调高系统响应速度慢等问题。
1 液压调高系统的原理采煤机启动后,依据记忆截割的采样点所拟合的煤岩分界线的初始高度,电机驱动油泵输送液压油,经阀门与管路至油缸,推动活塞杆,调整滚筒达到设定高度。在行进过程中,检测装置实时检测活塞杆的伸缩长度与位姿信号,经计算得到滚筒高度,控制系统对比实际高度与设定高度,给出修正信号,修正信号的正负与大小控制着阀芯的开闭方向与开合程度,继而改变液压缸左右两腔内油压的大小,形成油压差,推动活塞杆发生位移,从而达到滚筒高度调整的目的。通过上述过程,可保证采煤机液压调高系统较高的稳定性和精确性[11]。
采煤机滚筒调高系统的机械部分结构如图1所示。采煤机运行过程中实时采集位移信号(油缸活塞杆总长L4)与位姿信号(油缸与O1、O3连线的夹角θ5),经数学计算得到滚筒高度H [12]。
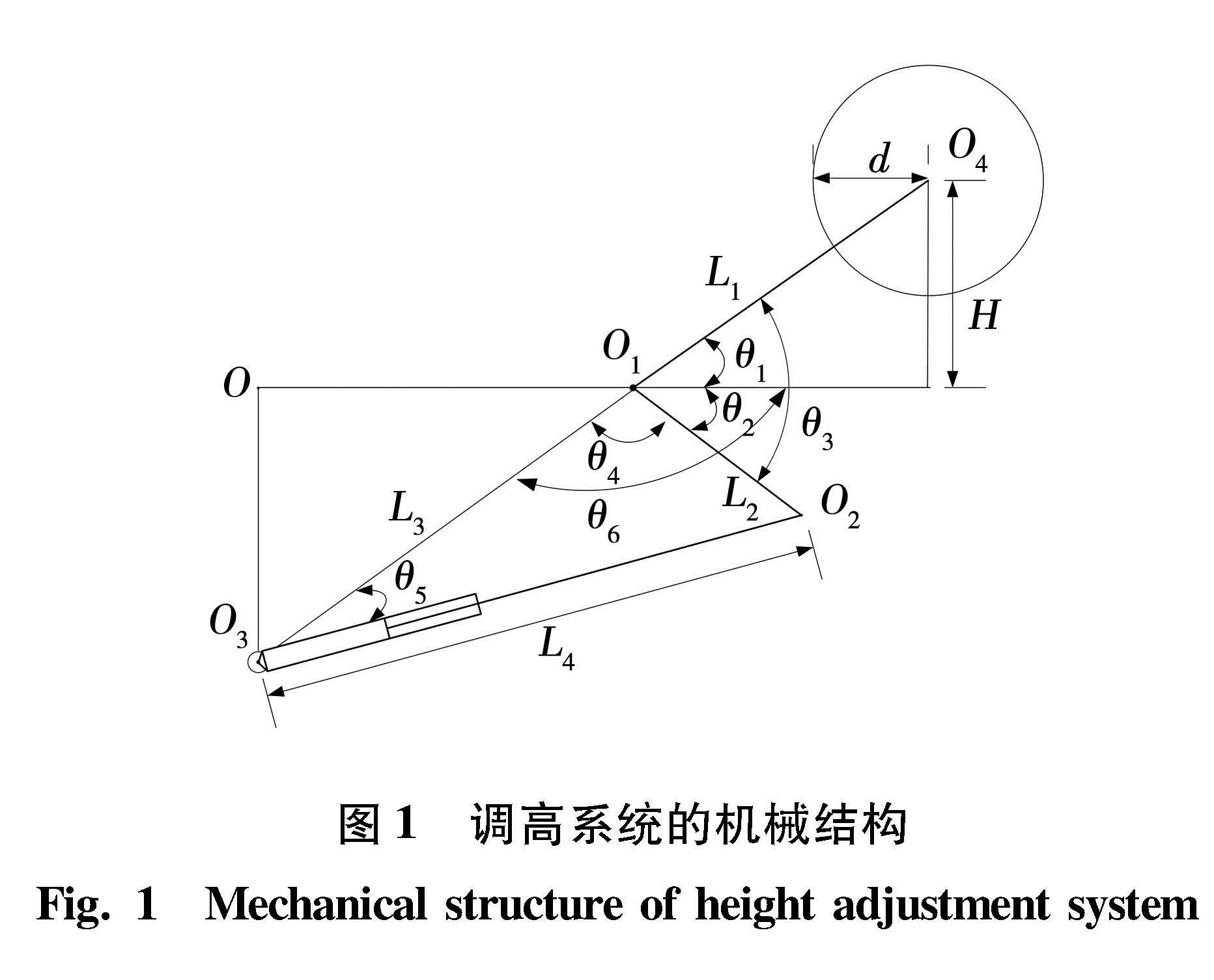
图1 调高系统的机械结构
Fig.1 Mechanical structure of height adjustment system
根据图1中几何关系,可知θ1 +θ2 =θ3,θ2 +θ4 =θ6,其中,θ3(大臂L1与小臂L2的夹角)、θ6(两铰接点O1与O3同水平面的夹角)在运行过程中为常数,θ2为小臂L2与水平面的夹角。图1调高系统的几何关系为
式中:θ1——大臂L1与水平面的夹角;
θ4——小臂L2与O1、O3连线的夹角。
联立式(1)和(2),可得L4、θ5与H之间的数学关系为

由式(3)可知,采煤机滚筒的高度与液压活塞杆的伸缩量为非线性关系,活塞杆伸出量L4位移增大,滚筒高度H在竖直方向的位移增量逐渐减小。笔者采用改进的蚁群算法,依据不同的煤岩分界线,寻优与当前工况匹配的PID调高控制系统的参数(KP、KI、KD),实时对控制系统进行调整,以达到最佳的截割效果。
2 蚁群优化算法2.1 蚁群算法的原理每一只蚂蚁在觅食过程中的决策[13],由两个因素决定:一是蚂蚁对食物的需求,导致它将做出自启发式的动作,表现为在路径选择中,从某一个节点到下一个节点的路径是随机的,(r,s)表示蚂蚁所作出的决定,即为从节点r到节点s,d(r,s)为节点r到节点s的距离; 二是蚂蚁对信息素的敏感度,用τ(r,s)表示敏感度的强弱,由于敏感度与信息素浓度正相关,因此,τ(r,s)的大小也可以反映两个节点r、s之间路径上信息素浓度高低。
假设集合Z包含此次觅食事件中的所有节点(不含节点r),计算一只蚂蚁由节点r到节点s的概率为
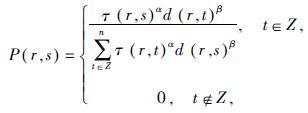
式中:α——信息素浓度重要程度因子;
β——启发函数重要程度因子。
预先设置的参数α与β,用来调控节点距离信息与信息素浓度两者对概率结果的权重关系。
当蚁群中所有蚂蚁n均进行一轮路径选择后,则区域中的路径信息素也完成一轮更新。蚁群中第k只蚂蚁完成路径通过后,其信息素浓度更新为
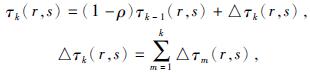
式中:△τk(r,s)——第k只蚂蚁释放信息素的浓度;
ρ——信息素挥发因子(小于1的常数);
△τm(r,s)——第m只蚂蚁经过节点r和s之间释放的信息素浓度。
式中:Lm——第m只蚂蚁经过路径的总长度;
Q——一只蚂蚁完成一次路径行走所释放的信息素总量,且每只蚂蚁的释放量相同(常数)。
由式(4)可知,长度越短的路径,单位长度内蚂蚁释放的信息素浓度就越高,进而更多的蚂蚁选择该路径,将有更多的信息素遗留在此路径,出现正反馈效应,最终发展为整个蚁群的智能行为。
2.2 蚁群算法寻优PID参数为更好地描述蚁群算法对PID参数整定寻优的过程,将这一事件转化为蚁群觅食的网络问题[14],如图2所示。
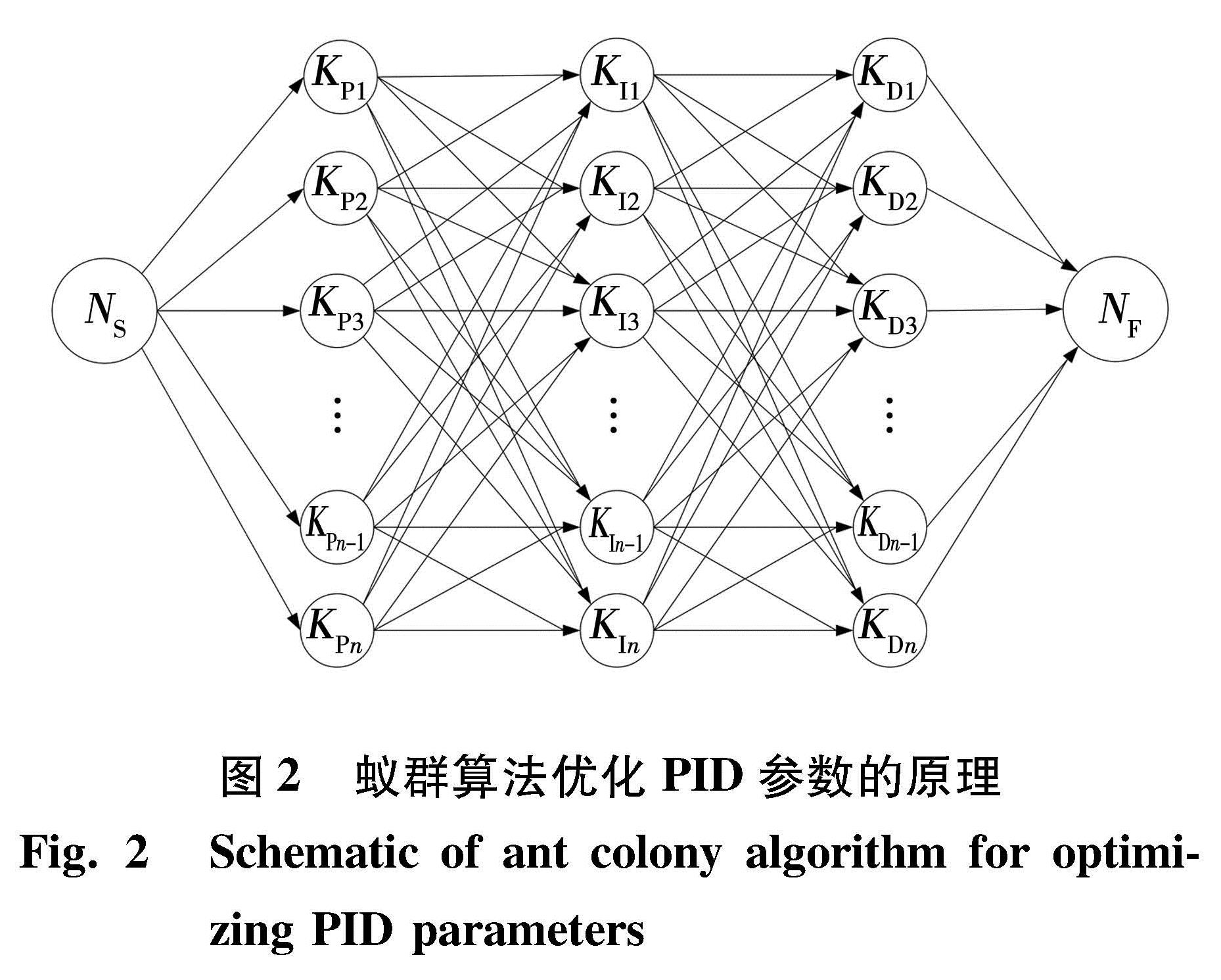
图2 蚁群算法优化PID参数的原理
Fig.2 Schematic of ant colony algorithm for optimizing PID parameters
设置开始节点NS与完成节点NF,分别视为蚂蚁的巢穴与食物所在地; 再使用三个不同的向量组分别放置三个参数(KP、KI、KD)相关的所有值,每个向量组视为一个节点群,蚂蚁每次需从中随机选取一个节点作为路径链接点; 节点间的矢量则代表觅食路径方向与长短。蚂蚁从开始节点出发,每次到达一个节点群时,随机选取一个节点行进,最终到达完成节点且在路径中释放信息素,途经的三个随机节点与连接节点间的矢量构成一条觅食路径,而后原路返回,完成整个闭环的觅食工作。整个蚁群经过多次往返,路径中的信息素不断更新,信息素浓度最高的路径所经过的三个节点,即为节点NS、NF之间的三个节点群中的最优的节点,两两之间相互连接,构成最短路径。
2.3 改进的蚁群算法寻优PID参数在采煤机调高控制系统中,由于控制系统的输入为设定的煤岩分界线u(t),输出为滚筒的截割曲线y(t),无法直观体现“觅食路径”这一关键指标。因此,对蚁群算法进行一定的改进,设置指标函数δ替代路径长度L,用以检验蚁群算法的性能,从而改进整个行为系统,以尽可能降低错误率。故而,文中选取积分平方误差e1(ISE)、积分绝对误差e2(IAE)和积分时间绝对误差e3(ITAE)作为主要评价指标; 而为防止误差为零而影响运算,加入输入u(t)的积分值U作为次要评价指标,对以上进行加权组合,构成指标函数[15]为
e(t)=u(t)-y(t),
式中,ω——各指标的权重。
为确保指标函数值合理,防止算法陷入局部最优或过早收敛,文中选取 [ω1 ω2 ω3 ω4] = [0.3 0.3 0.4 1],则蚂蚁释放的信息素浓度式(4)更新[15]为

式中:τm(r,s)——第m只蚂蚁所选取的路径的三个节点(KP、KI、KD)所释放的信息素浓度;
δm——第m只蚂蚁寻优所得的三个参数输入控制系统得到的指标函数值。
在实际控制系统中,节点间矢量的长度也无法定量描述,因此,将Lm的均值作为dm(r,s)的取值。蚁群算法优化PID参数的流程及优化后的调高系统的结构如图3所示。
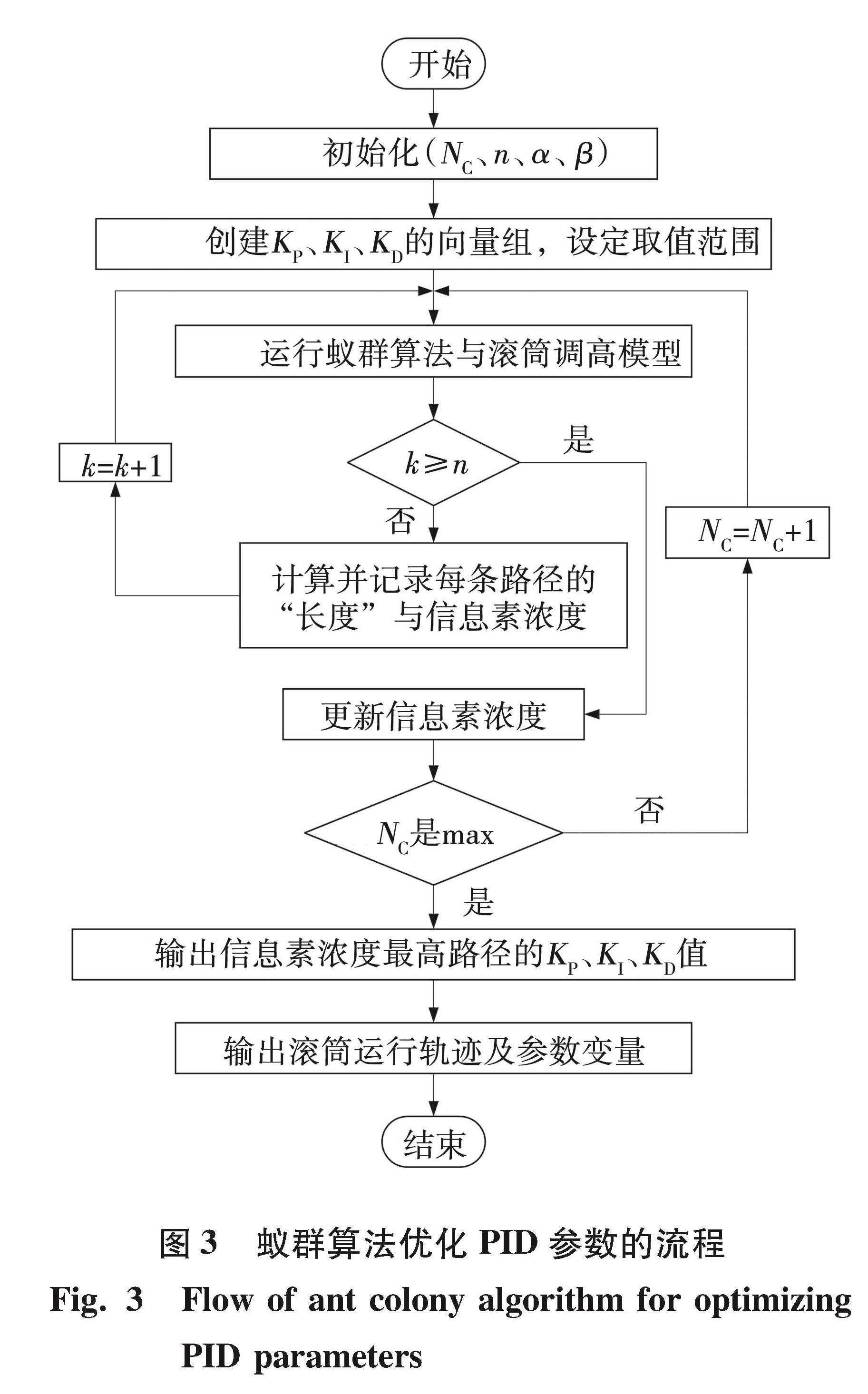
图3 蚁群算法优化PID参数的流程
Fig.3 Flow of ant colony algorithm for optimizing PID parameters
3 仿真与结果分析3.1 仿真模型的建立
仿真模型以Matlab为载体,液压调高控制系统由Simulink中的hydraulics模块搭建而成,蚁群算法则在Matlab中运算出KP、KI、KD的值给到Simulink中的PID控制器用于控制。文中设定数段连续的折线作为记忆截割中拟合的初始高度曲线,以此为输入。采煤机滚筒截割煤岩,工况复杂且负荷突变,因而在模型中采用弹簧、质量块和阻尼的联合体,来模拟煤壁被截割瞬间的具有冲击性的大负荷。依据采煤机液压调高原理和蚁群算法构建的仿真模型[16]如图4所示。
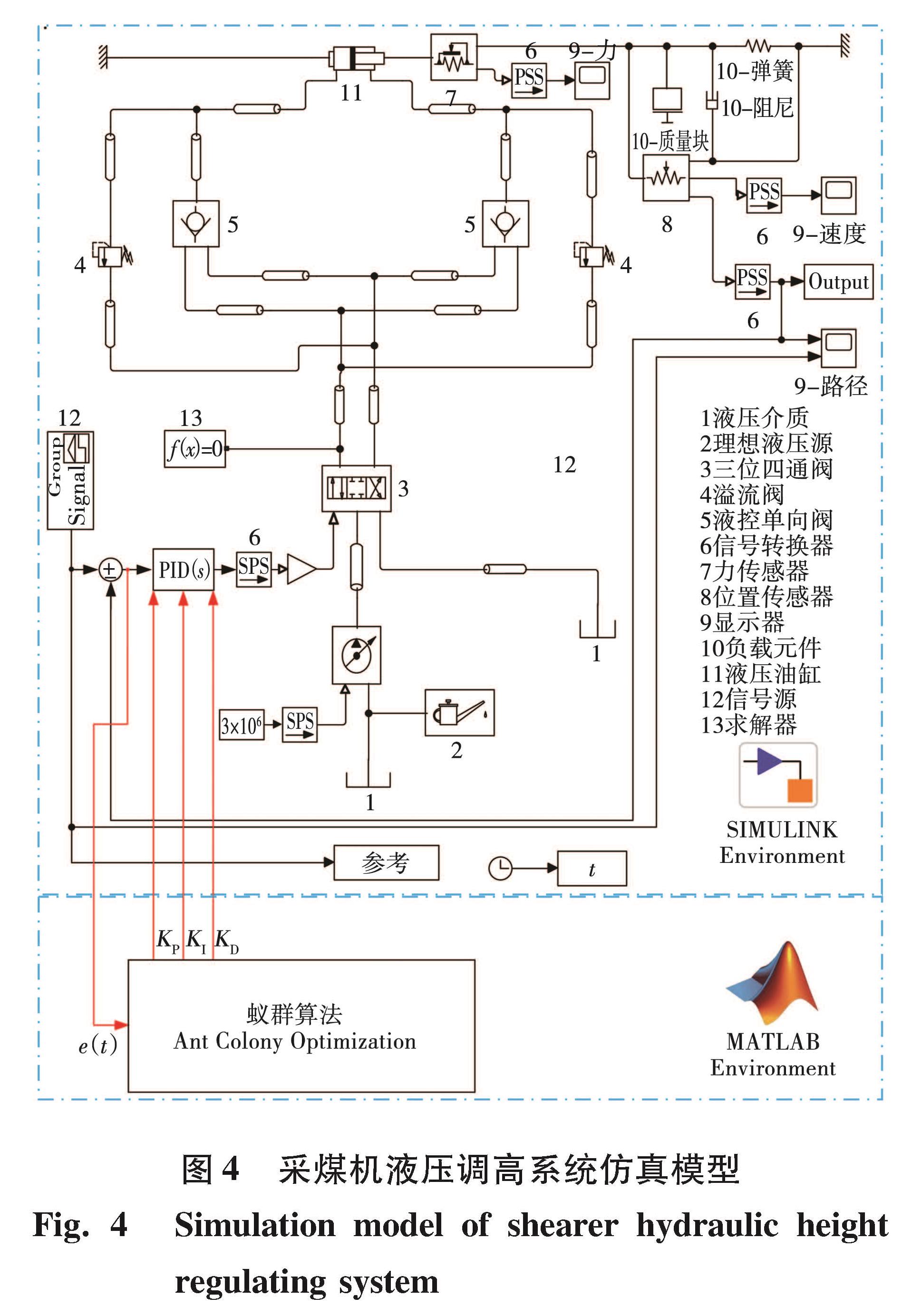
图4 采煤机液压调高系统仿真模型
Fig.4 Simulation model of shearer hydraulic height regulating system
3.2 结果分析
根据工业生产中设备各部件的实际尺寸及工况为每个模型设置参数[17],油缸的有无杆腔端活塞面积分别为S=0.02 m2、S'=0.012 m2,弹簧负载的弹性系数为K=2 500 N/m,阻尼负载的系数为C=2 500 N/(m·s-1),负载块的质量M=2 500 kg,液压管路长度L与内径L'分别为1、0.012 m,其余未被列出并使用的模型元件采用默认参数。
在蚁群算法中,设定信息素浓度重要程度因子α= 0.8,启发函数重要程度因子β=0.2,信息素释放量Q=10; 设定蚁群蚂蚁的数量与迭代次数分别为n= 30、NC =100。
由式(5)、(6)可知,指标函数值越小,则路径跟踪性越好,其寻优所得的KP、KI、KD值更加契合于控制器对当前输入工况的调高控制。算法在迭代过程中各阶段所取得的最优的指标函数δ值,如图5所示。
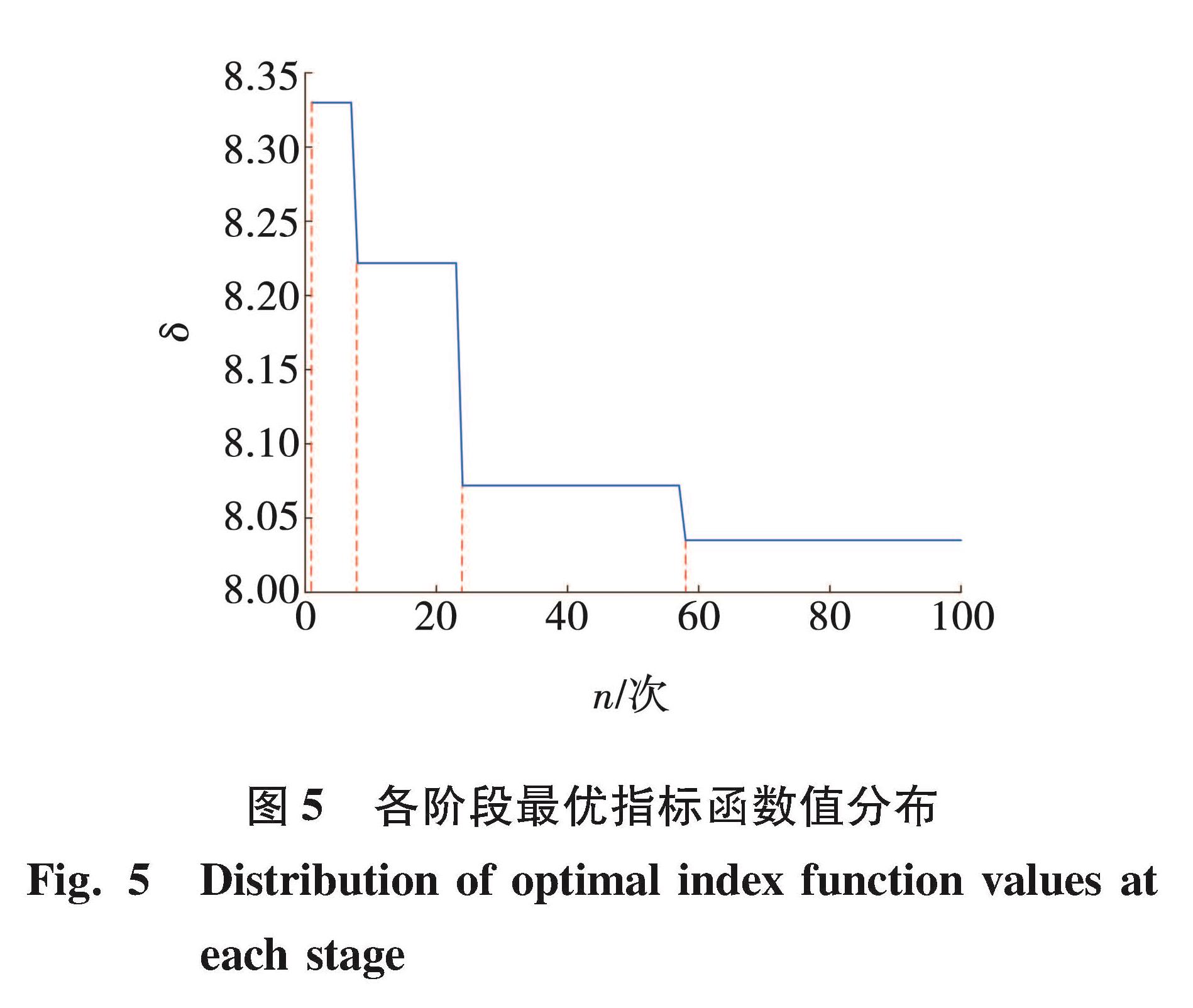
图5 各阶段最优指标函数值分布
Fig.5 Distribution of optimal index function values at each stage
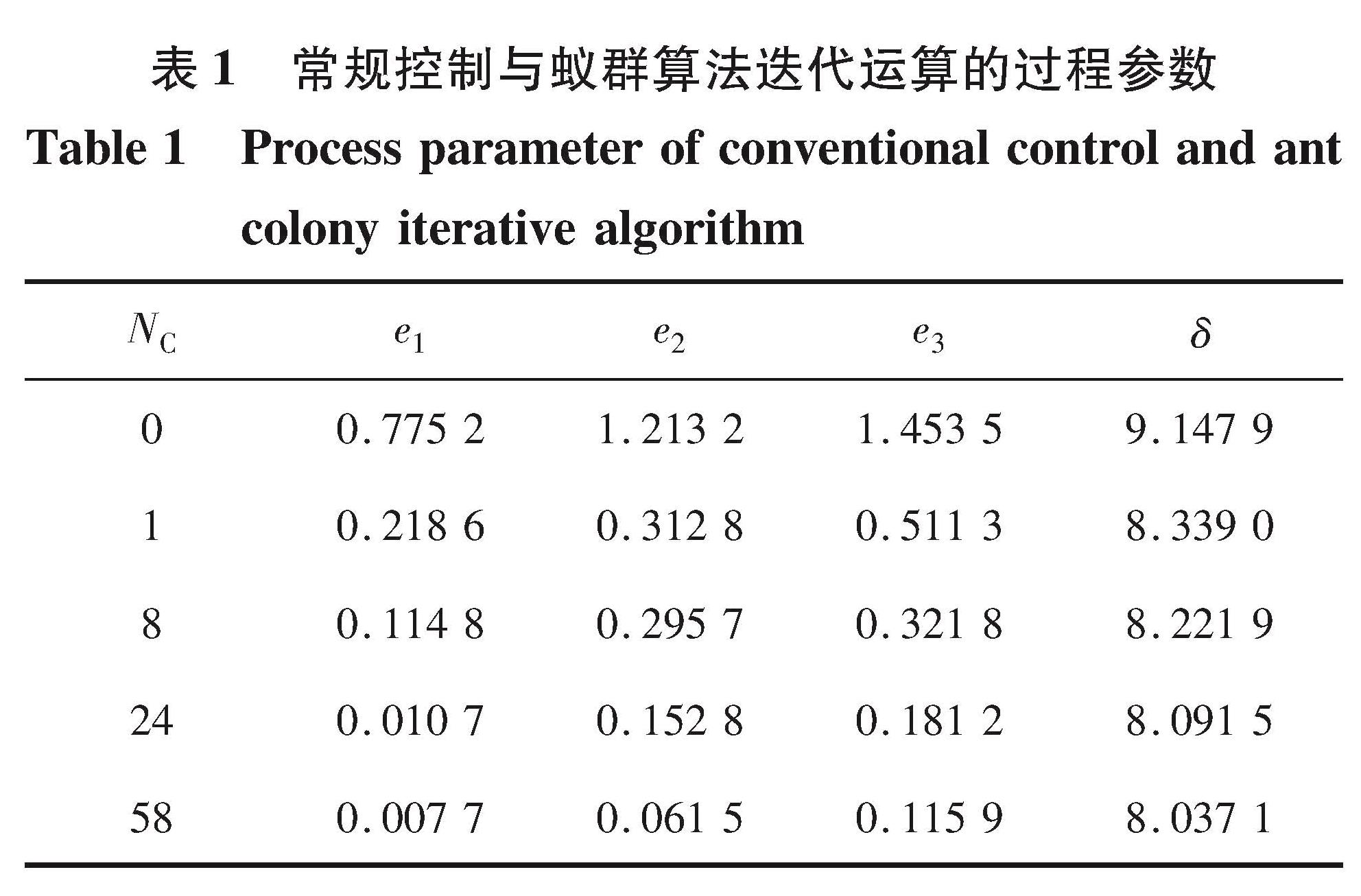
由图5可见,算法在第1、8、24、58次迭代时,分别取得每个阶段的最优指标函数值。常规闭环PID控制(NC=0)与蚁群算法迭代运算的过程参数如表1所示。三个误差值为e1、e2、e3,输入曲线u(t)的积分值U=7.97与相应的指标函数δ值。以表1作为参数寻优迭代运算的过程证明与计算依据。
表1 常规控制与蚁群算法迭代运算的过程参数
Table 1 Process parameter of conventional control and ant colony iterative algorithm
将5次迭代寻优所得的PID控制器的三个参数输入到仿真模型中,得到输出路径曲线对比及其局部放大效果如图6所示。
综上可知,常规控制中的PID参数为多次试验所得,具有偶然性,且存在较大误差; 而通过改进蚁群算法来寻优PID参数,以更小的误差、增强路径跟踪性为算法建立的核心,更具有科学性,其寻优特性将使控制系统具备了一定对不同煤岩分界线的自适应调节能力。
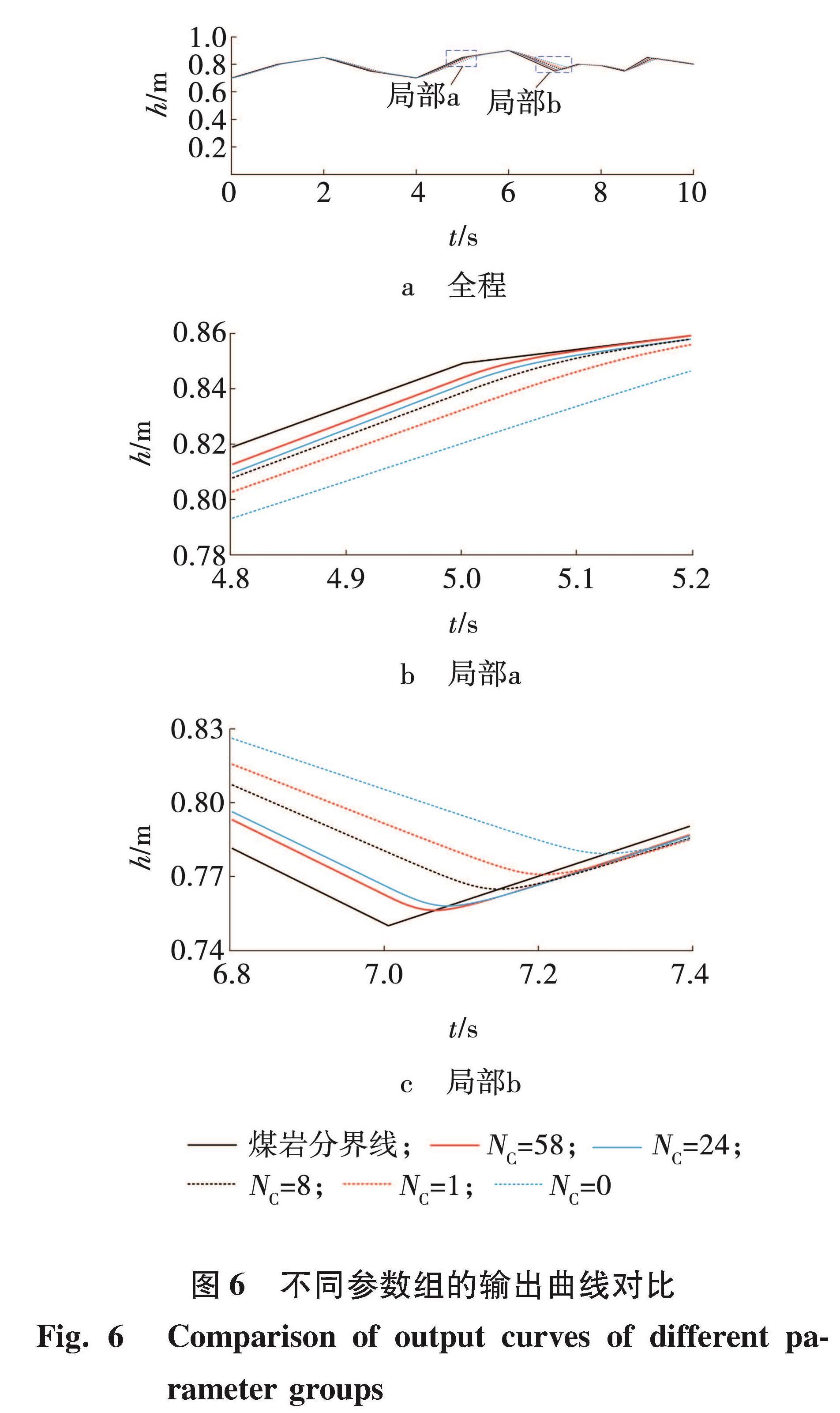
图6 不同参数组的输出曲线对比
Fig.6 Comparison of output curves of different parameter groups
分别选用常规闭环PID控制与蚁群算法优化的PID控制器运行所得(NC=58)的结果,两者进行对比分析。滚筒路径曲线的时程如图7所示。对比两者与设定高度可知,采用优化算法的控制系统输出路径跟踪性更优,基本与设定路径重合,最大偏差值小于0.01 m。
由图7b可见,在t=4.0 s与t=6.0 s时,蚁群优化控制系统更快完成调整动作,在4.0~5.5 s内蚁群优化控制系统的输出贴近输入设定值。由图7c可知,常规闭环控制则存在0.2 s的延迟才达到目标,控制精度较差。
油缸活塞杆速度对比曲线如图8所示。从图8b可以看出,蚁群优化控制系统的响应速度更快,调整持续时间更短,常规控制系统的响应滞后0.2 s(t=7 s),且速度较之慢20%,极大影响控制效果。
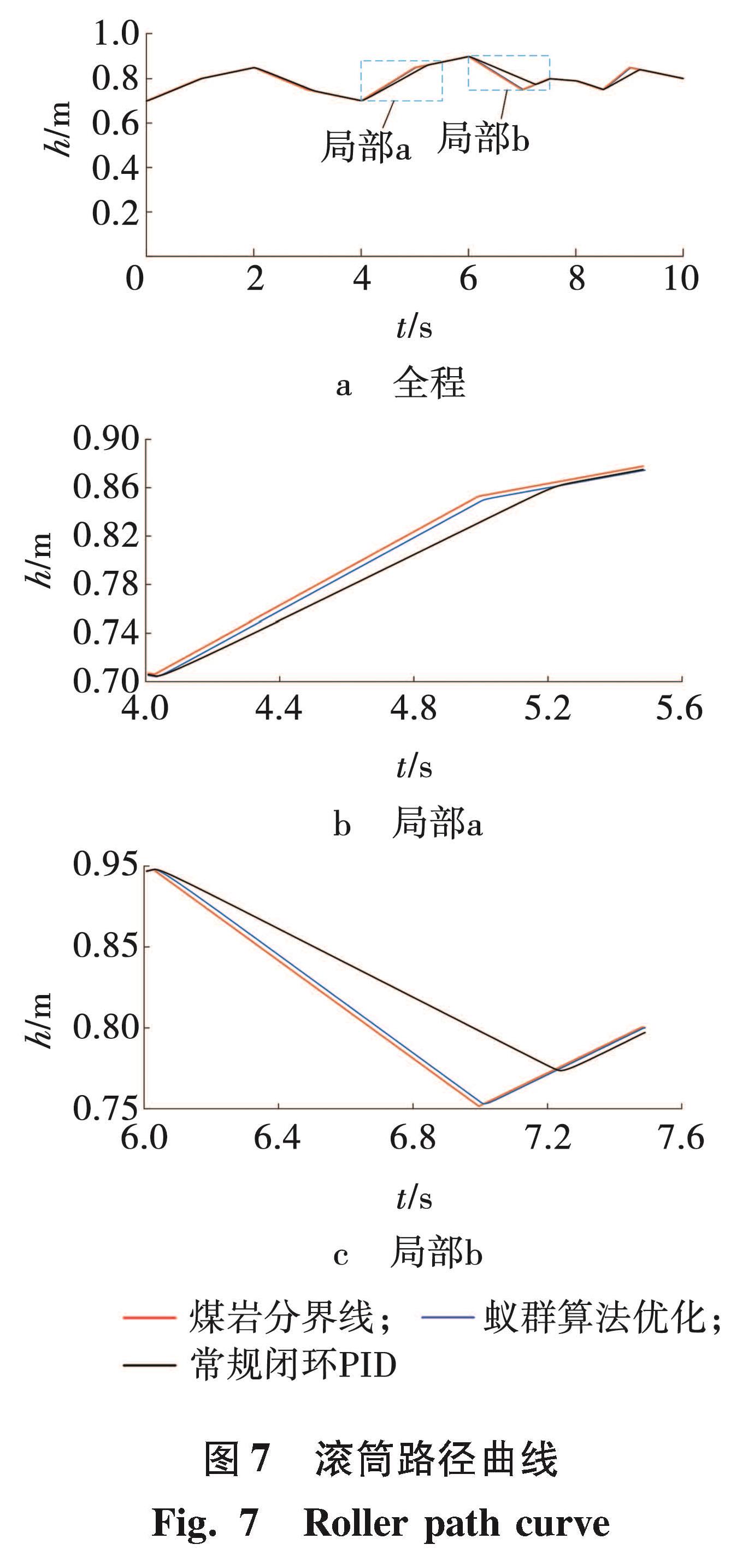
图7 滚筒路径曲线
Fig.7 Roller path curve
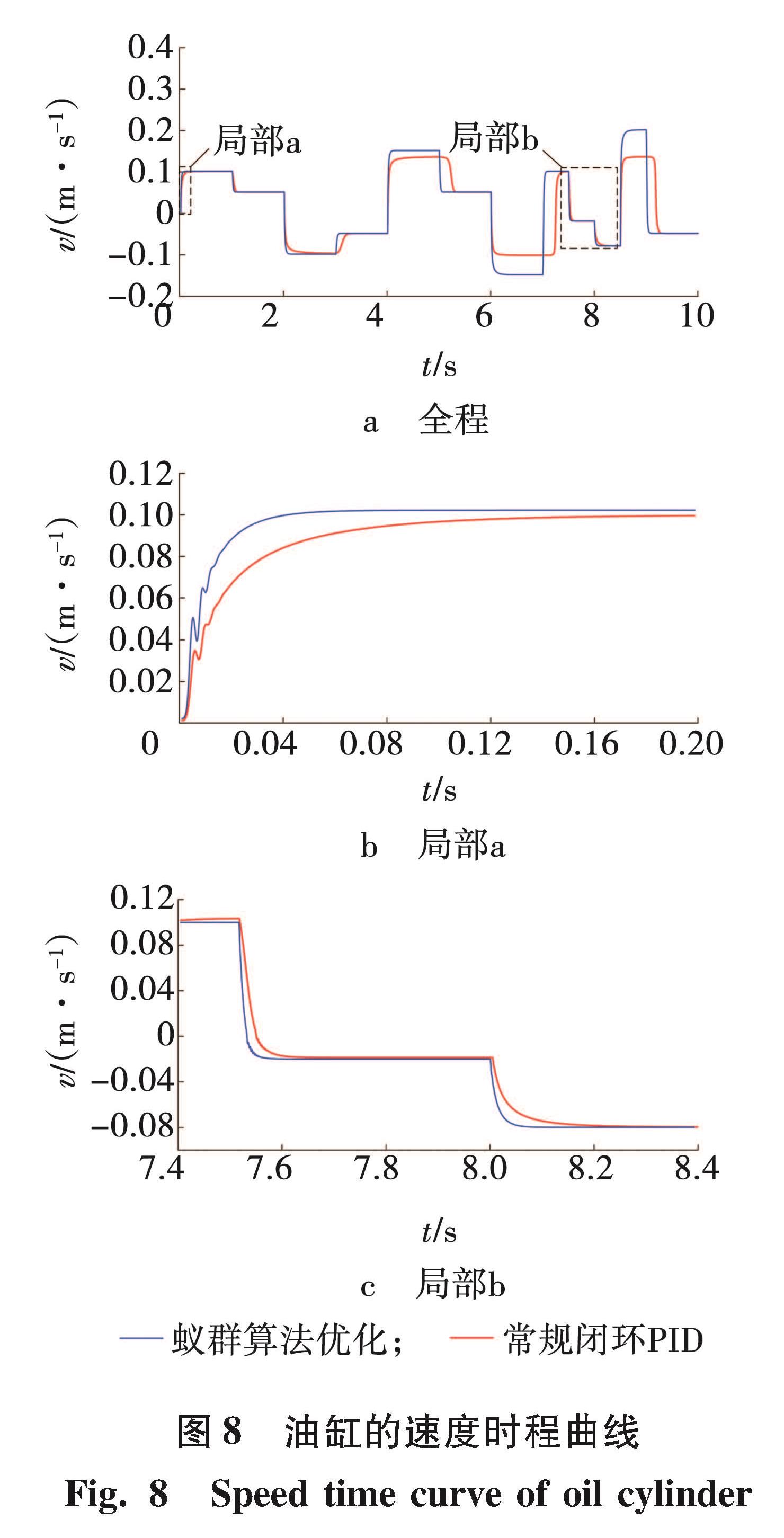
图8 油缸的速度时程曲线
Fig.8 Speed time curve of oil cylinder
油缸活塞受力时程的曲线如图9所示。在图9c中,路径方向发生反转,油压震荡变化,但控制系统的负反馈调节使其迅速归位并趋于稳定。蚁群优化控制系统的震荡幅度略大,但收敛更快。
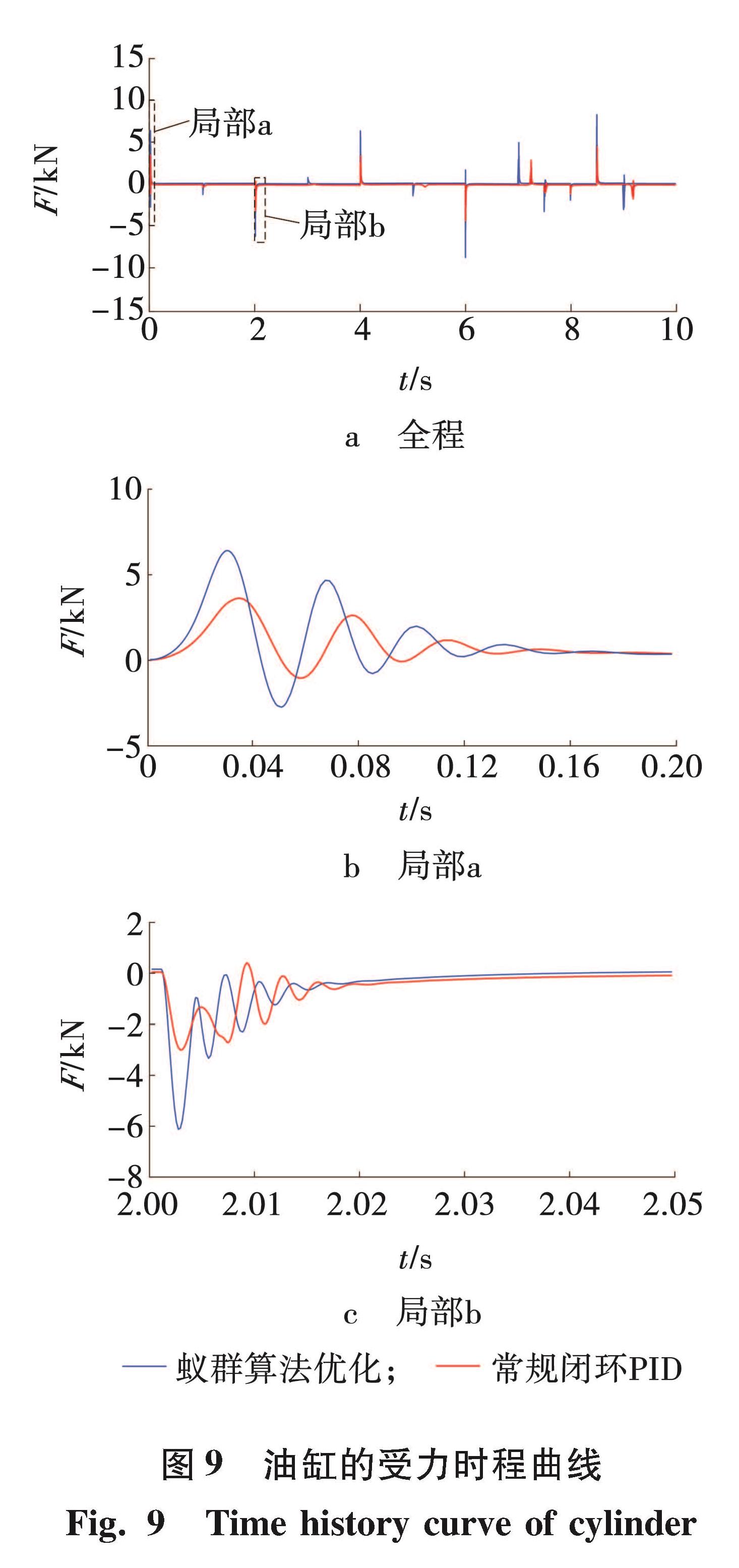
图9 油缸的受力时程曲线
Fig.9 Time history curve of cylinder
4 结 论
采用改进蚁群算法优化采煤机滚筒液压调高控制系统中的PID控制器的参数,用来提升控制效果。
(1)输出曲线积分绝对误差e2小于输入路径积分值U的0.1%,最大偏差值小于0.01 m,系统输出曲线路径跟踪性极强,符合预期控制目标。
(2)优化后的控制系统的响应速度更快,调整持续时间更短,与常规闭环控制系统速度相比快20%,解决了采煤机滚筒调高控制系统响应速度慢和精度低的问题。
- [1] 刘春生, 杨 秋, 李春华. 采煤机滚筒记忆程控截割的模糊控制系统仿真[J]. 煤炭学报, 2008, 33(7): 822-825.
- [2] 葛世荣, 郝尚清, 张世洪, 等. 我国智能化采煤技术现状及待突破关键技术[J]. 煤炭科学技术, 2020, 48(7): 28-46.
- [3] 高有进, 杨 艺, 常亚军, 等. 综采工作面智能化关键技术现状与展望[J]. 煤炭科学技术, 2021, 49(8): 1-22.
- [4] 冯银辉, 崔 耀, 王旭峰, 等. 大采高综采工作面设备智能控制系统研究[J]. 煤炭科学技术, 2022, 50(9): 192-199.
- [5] 汪亮培. 采煤机电液比例调高控制仿真研究[D]. 淮南: 安徽理工大学, 2019.
- [6] 毛 君, 郭 浩, 陈洪月. 新型萤火虫算法及在采煤机自动调高PID 控制中的应用[J]. 机械设计, 2019, 36(8): 55-60.
- [7] 赵丽娟, 李 苗. 采煤机自动调高系统的模糊PID 控制仿真[J]. 辽宁工程技术大学学报(自然科学版), 2016, 35(10): 1075-1080.
- [8] 刘春生, 荆 凯, 杨 秋. 采煤机滚筒截割记忆程控的灰关联度计算新方法[J]. 煤炭学报, 2006, 31(5): 666-669.
- [9] 王忠宾, 徐志鹏, 董晓军. 基于人工免疫和记忆切割的采煤机滚筒自适应调高[J]. 煤炭学报, 2009, 34(10): 1405-1409.
- [10] 樊启高, 李 威, 王禹桥, 等. 一种采用灰色马尔科夫组合模型的采煤机记忆截割算法[J]. 中南大学学报(自然科学版), 2011, 42(10): 2913-2918.
- [11] 王雅东, 赵丽娟, 张美晨. 采煤机自适应调高控制策略[J]. 煤炭学报, 2022, 47(9): 3505-3522.
- [12] 郝慧芬, 范景强. 基于模糊PID的采煤机滚筒调高技术优化设计[J]. 煤矿机械, 2020, 41(11): 115-117.
- [13] 温文波, 杜 维. 蚁群算法概述[J]. 石油化工自动化, 2002(1): 19-22.
- [14] Mahfoud S, Quynh N. A new hybrid ant colony optimization based PID of the direct torque control for a doubly fed induction motor[J]. World Electric Vehicle Journal, 2022,13: 78-85.
- [15] 沈春娟. 基于自适应蚁群算法的PID控制器设计[J]. 仪表技术与传感器, 2016(12): 126-128.
- [16] 戚海永. 基于Matlab/Simulink的采煤机液压调高系统仿真[J]. 煤矿机械, 2012, 33(11): 54-55.
- [17] 陈金国. 基于单向示范刀采煤机滚筒调高系统的研究[D]. 哈尔滨: 黑龙江科技学院, 2012.