 图 1 总体结构设计
Fig.1 Overall structure design
图 1 总体结构设计
Fig.1 Overall structure design
Wang Fangbin,Yan Ruiyang.Structural design and optimization of semi-frame photovoltaic cleaning robot[J].Journal of Heilongjiang University of Science & Technology,2023,33(02):266-274,280.[doi:10.3969/j.issn.2095-7262.2023.02.019]

随着社会的高速发展,能源需求日益递增。我国为保障经济社会的可持续性发展,正在大力发展太阳能技术。但在电站运行过程中,由于气候干燥、风沙较多等各种因素作用,光伏组件表面经常会沉积大量灰尘等遮盖物造成发电效率严重下降,最高可达35%[1]。因此光伏板表面实时高效清洁是当前光伏发电产业所面临需要亟待解决的问题。
目前光伏板表面清洁主要有人工清洗、机械清洗、自清洁薄膜技术和电除尘等几种方式,其中机械除尘技术应用最为广泛[2]。光伏清洁机器人作为机械除尘的主要代表,有车载机械臂式、小型爬壁式和框架式等[3]。其中,车载机械臂式机器人清洁效率最高,但设备体积大、成本高,且末端执行器容易对光伏板表面造成机械损伤[4],应用较少; 小型爬壁式机器人体积小、质量轻,可以根据光伏板大小规划路径进行清洁,但是清洁效率不高,适用于小型光伏电站[5]; 框架式机器人移动速度快、清洁效率高且容易维护,是大型光伏发电站的首选设备[6],但该设备重量大,易对光伏板造成应力损伤导致发电效率下降,且存在功耗大、惯量大、响应速度慢等不足[7]。
笔者以框架式清洁机器人结构为设计基础,提出一种半框架式清洁机器人设计方案,该机器人通过上行走机构带动机器人自身运动,省略下行走机构。为降低机器人重量,以行走机构支撑架为对象进行拓扑优化设计,然后对优化后模型进行参数化建模,并利用参数灵敏度分析以减少设计变量个数,再利用中心复合设计(Central composite design,CCD)获得设计变量样本点,将其回归拟合得到克里金(Kriging)响应面模型,最后通过多目标遗传算法(Multi-objective genetic algorithm,MOGA)迭代优化得到帕累托(Pareto)最优解并进行有限元分析验证。通过对物理样机运行测试,验证机械结构设计的合理性和控制系统的有效性,从而实现半框架式清洁机器人轻量化设计。
1 总体设计文中以300 W光伏组件(尺寸为1 960 mm×990 mm×35 mm,安装倾角取40°左右)为清洁对象,根据清洁机器人经济性、可靠性和易维护性等要求提出总体设计方案,如图1所示,主要包括行走机构、清扫机构、控制系统和电源模块等。
机器人利用行走机构和光伏板配合使机器人悬挂在光伏板表面,实现机器人的往返运动; 清扫机构与行走机构连接,利用滚刷旋转清理积灰; 控制系统和电源模块实现机器人的智能控制和续航。
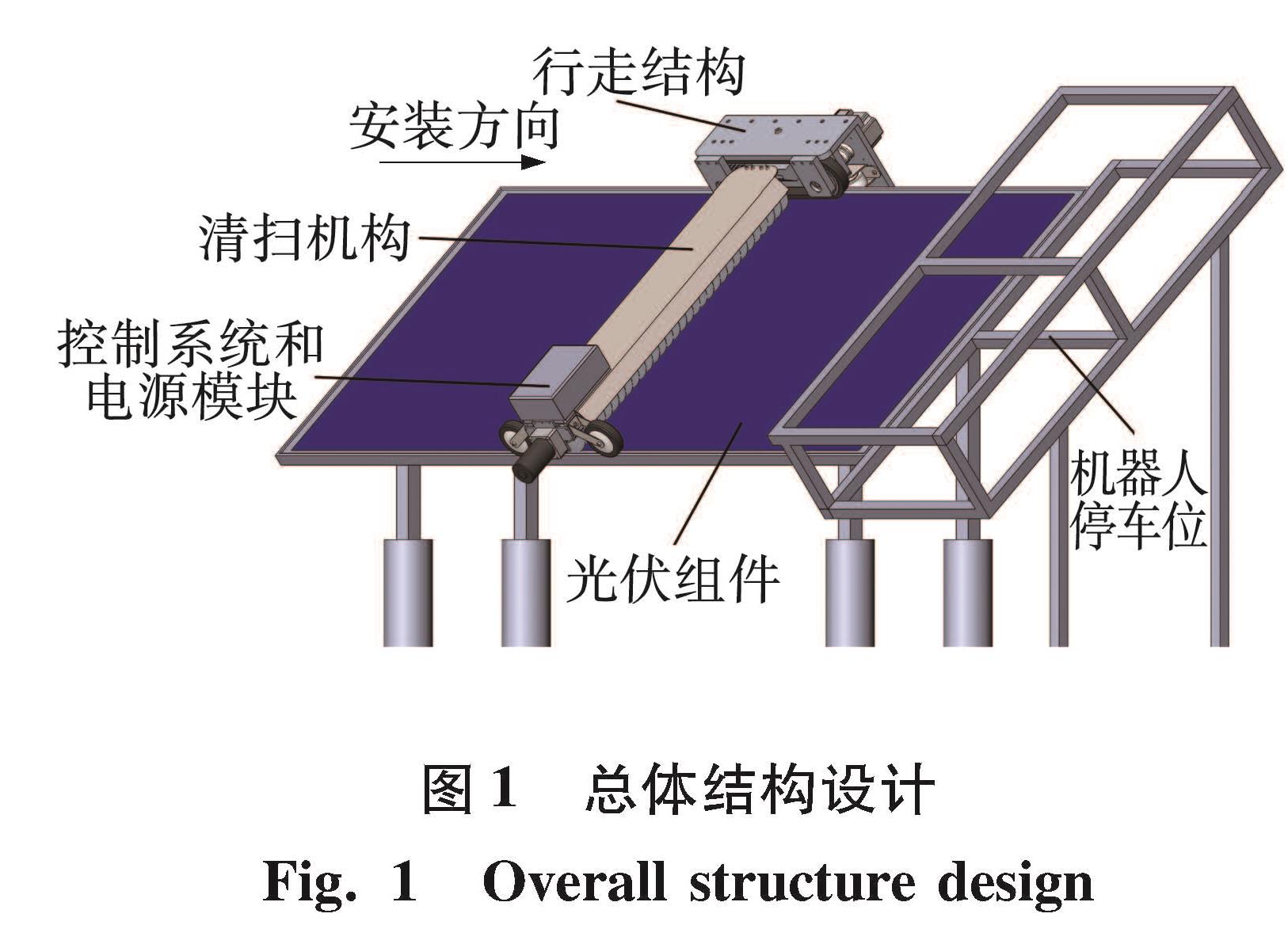
图1 总体结构设计
Fig.1 Overall structure design
1.1 行走机构
行走机构如图2所示。其中,行走电机驱动同步履带传动机构实现机器人往返运动; 上支撑轮与同步带轮轴向相互垂直,两者独自承载机器人的部分重量,起到支撑和限位作用; 后张紧机构使张紧轮及同步履带紧密贴合光伏板,防止机器人产生空转; 鉴于机器人运行速度过快时可能会脱离光伏板,设计了可避障的下限位机构,限位件与光伏板上铝合金框架下表面配合防止机器人脱轨。
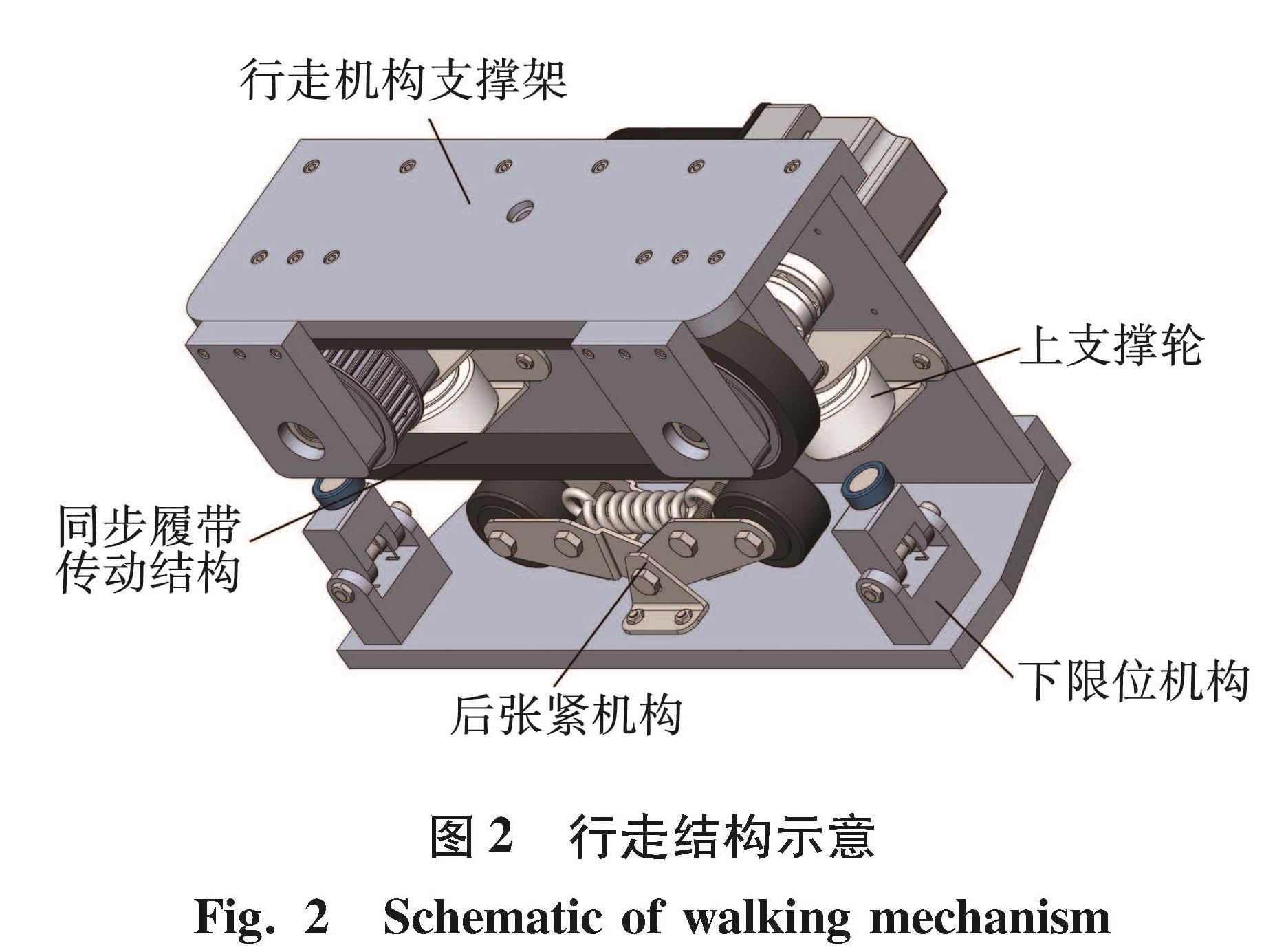
图2 行走结构示意
Fig.2 Schematic of walking mechanism
当行走机构工作时,同步带轮转速n1为
n1=(v1)/(πd1),
式中:v1──同步履带带速;
d1──同步带轮直径。
机器人正常运行时一般受到滚动摩阻和空气阻力(可忽略不计),最大滚动摩阻力偶矩Mmax为
Mmax=δ[mg(cos θ+sin θ)+F张],
式中:δ──滚动摩阻系数[8];
m──整机质量;
g──重力加速度;
θ──光伏组件安装倾角;
F张──张紧机构预紧力。
考虑到机器应具有一定的越障能力,行走电机输出扭矩M1取最大滚动摩阻力偶矩Mmax的2倍以上。
1.2 清扫机构清扫机构如图3所示,连接件与行走机构支撑架通过螺栓连接,挡尘板可以阻止灰尘对光伏板的二次污染,清扫电机驱动滚刷旋转,实现光伏板表面清洁。
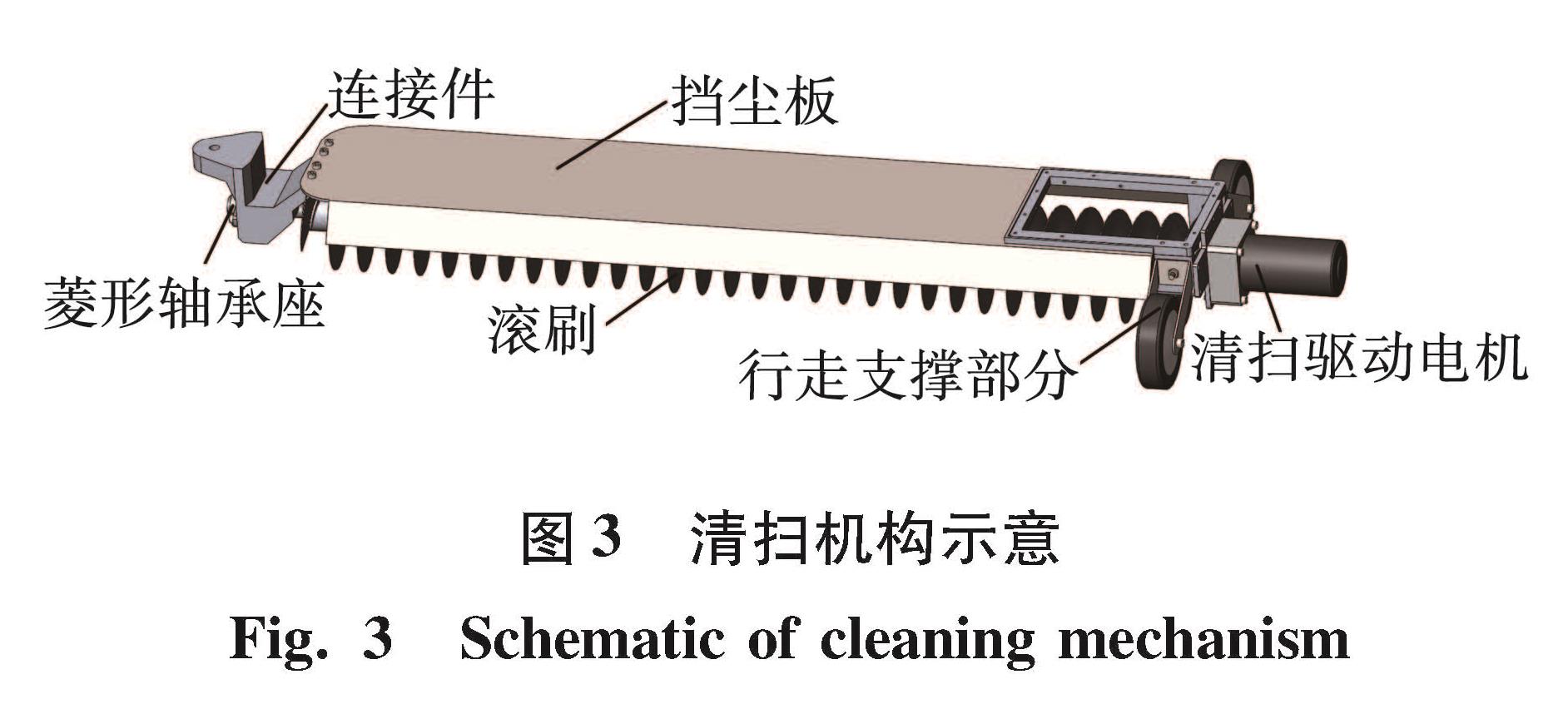
图3 清扫机构示意
Fig.3 Schematic of cleaning mechanism
刷丝可以视为柔性梁模型,通过单根刷丝对光伏板的正压力可以得到滚刷对光伏板的正压力[9]。则滚刷所受摩擦力f为
f=μFN,
式中:μ──刷丝和光伏板之间的摩擦系数;
FN──滚刷对光伏板的正压力。
则滚刷所受阻力矩T为
T=(fd2)/2,
式中,d2──滚刷直径。
考虑到电机启动功率大于电机额定功率[10],清扫电机输出扭矩M2取T的2倍以上,则电机所需功率P2为
P2=(2πn2M2)/(60),
式中:n2──清扫电机转速;
M2──清扫电机输出扭矩。
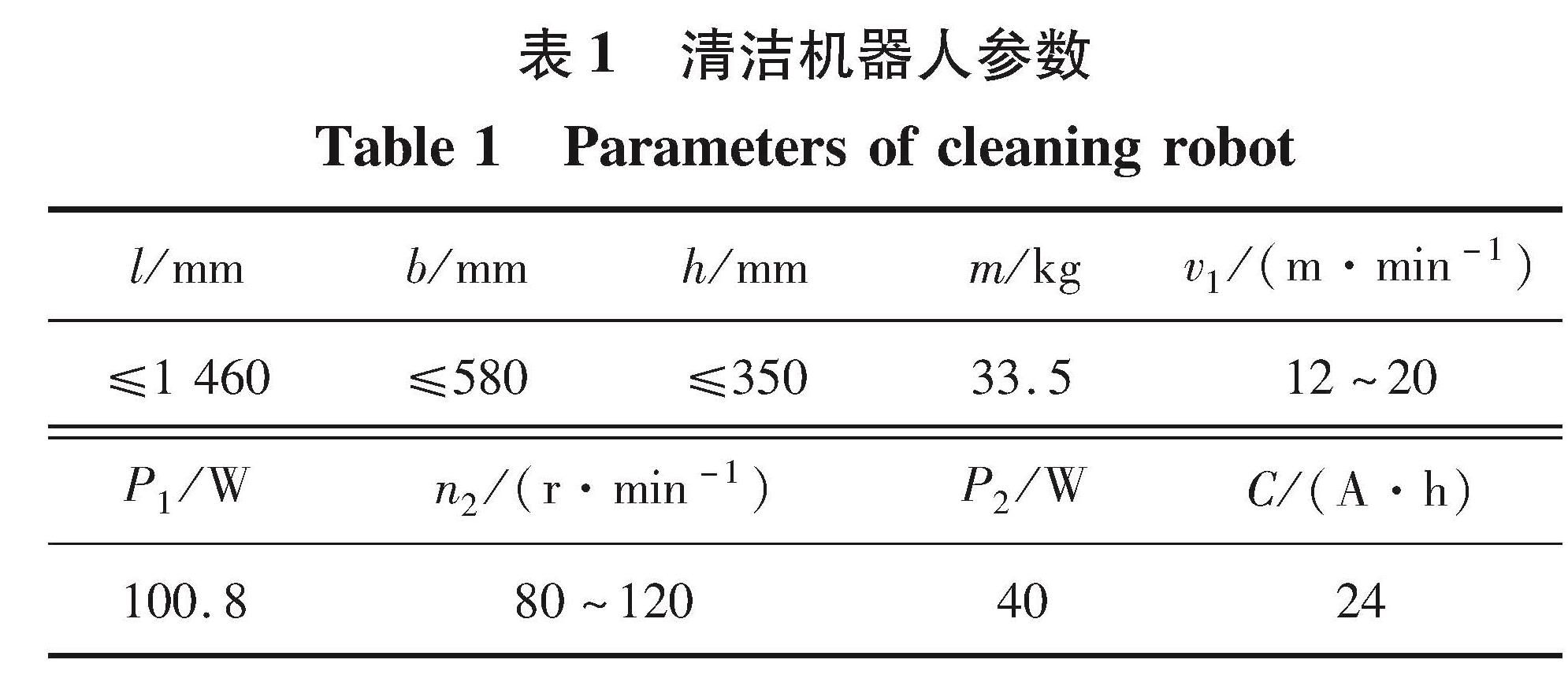
1.3 整机参数通过上述计算,可以确定半框架式光伏清洁机器人的设备参数如表1所示,其中,l为机器人长度,b为机器人宽度,h为机器人高度,P1为行走电机功率,C为蓄电池容量。
表1 清洁机器人参数
Table 1 Parameters of cleaning robot
2 轻量化优化设计流程
考虑到框架式清洁机器人通常重量较大,文中以行走机构支撑架为例提出一种轻量化优化方法,包括有限元模型建立、拓扑优化设计、响应面优化设计和优化结果评估,具体流程如图4所示。
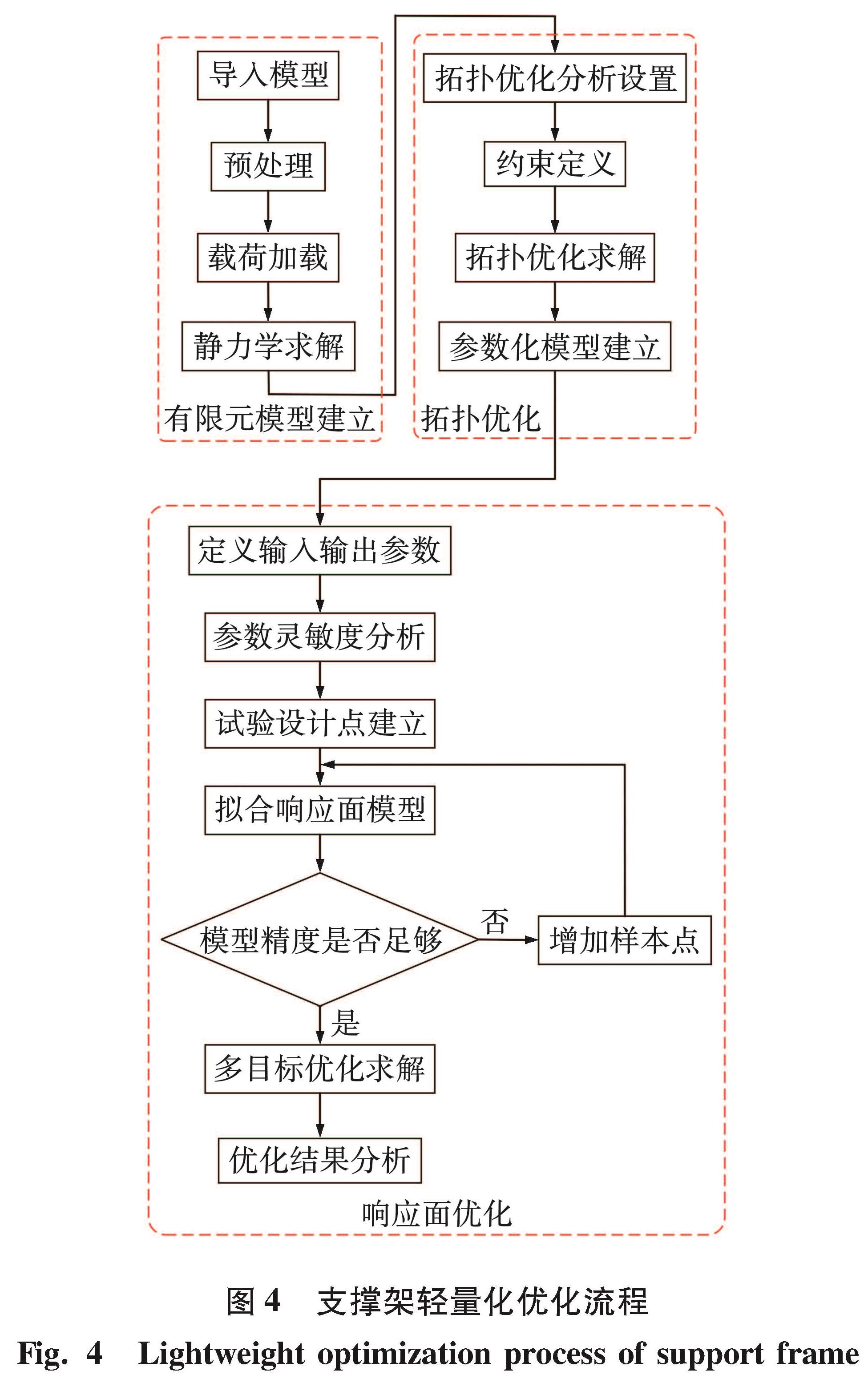
图4 支撑架轻量化优化流程
Fig.4 Lightweight optimization process of support frame
(1)有限元模型建立。利用SolidWorks软件建模并将其导入ANSYS软件,如图5所示,然后对模型进行预处理并进行载荷加载,最后通过静力学仿真判断模型是否满足应力应变要求。
(2)拓扑优化设计。对上述模型进行拓扑优化分析设置,定义优化区域和目标、响应约束、加工约束等,求解得到拓扑优化结果并将其作为参考,重新进行参数化建模。
(3)响应面优化设计。对参数化建模后的模型进行参数灵敏度分析获得主要设计变量,通过试验设计法得到变量样本点,将样本点回归拟合建立响应面模型,对响应面模型进行多目标优化得到Pareto最优解。
(4)结果分析。分析验证Pareto最优解,看是否满足设计要求,确定模型最优尺寸方案。
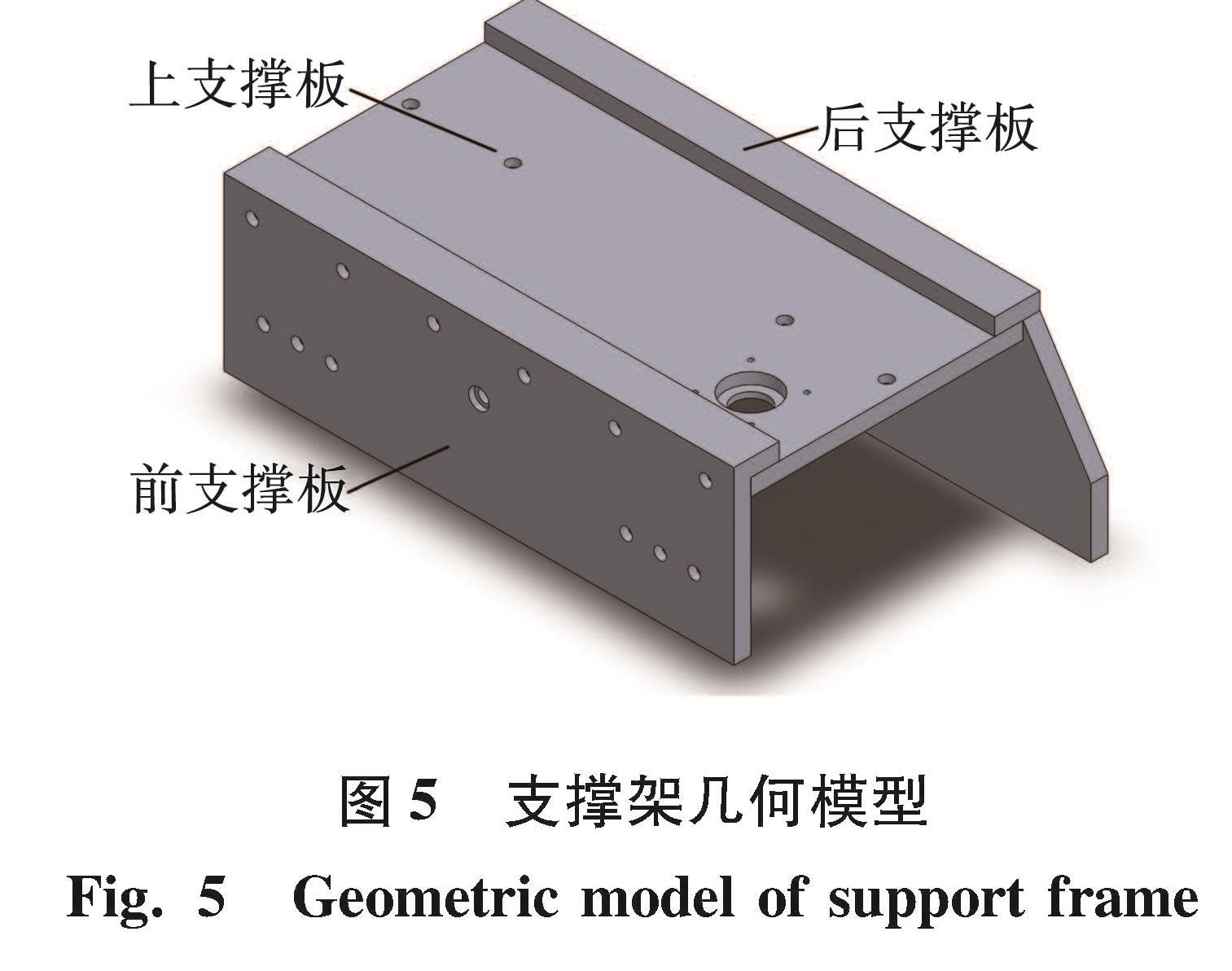
图5 支撑架几何模型
Fig.5 Geometric model of support frame
3 支撑架有限元模型建立3.1 预处理
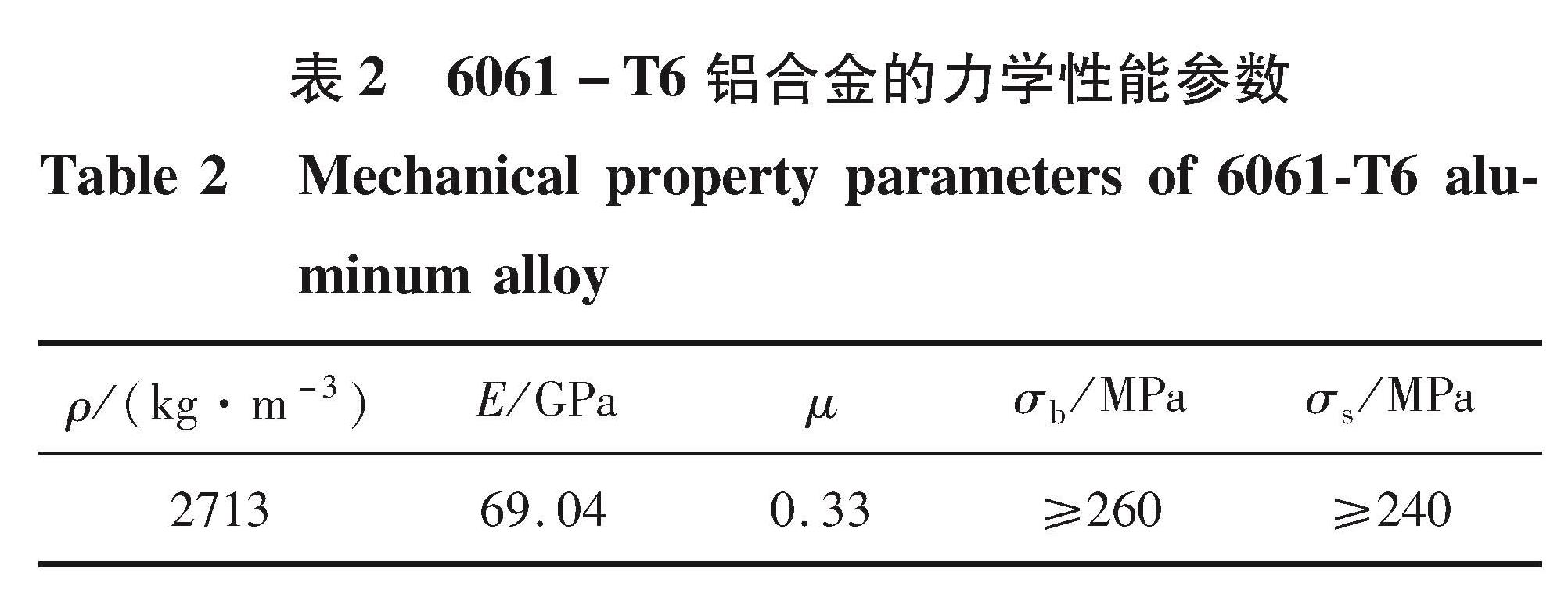
考虑零部件强度和刚度要求,选用6061-T6铝合金作为加工材料,材料参数如表2所示[11]。
表2 6061-T6铝合金的力学性能参数
Table 2 Mechanical property parameters of 6061-T6 aluminum alloy
为保证网格质量良好,采用Multizone多块扫掠网格划分方法,自由网格类型以Hex20为主,网格单元尺寸为5.4 mm,共有45 240个单元和211 426节点,网格单元质量为0.85,大于单元质量标准0.7。
3.2 支撑架静力学分析将支撑架视为一个整体,其主要承受清扫机构作用力、同步履带压轴力和张紧机构预紧力。
3.2.1 清扫机构作用力清扫机构一端和支撑架固定连接,另一端支撑在光伏板表面,为得到清扫机构对支撑架的作用力,以连接件螺栓孔中心为坐标原点O、光伏板表面法向为z轴和滚刷轴向为y轴,根据右手定则建立空间坐标系,则清扫机构整体受力分析如图6所示。
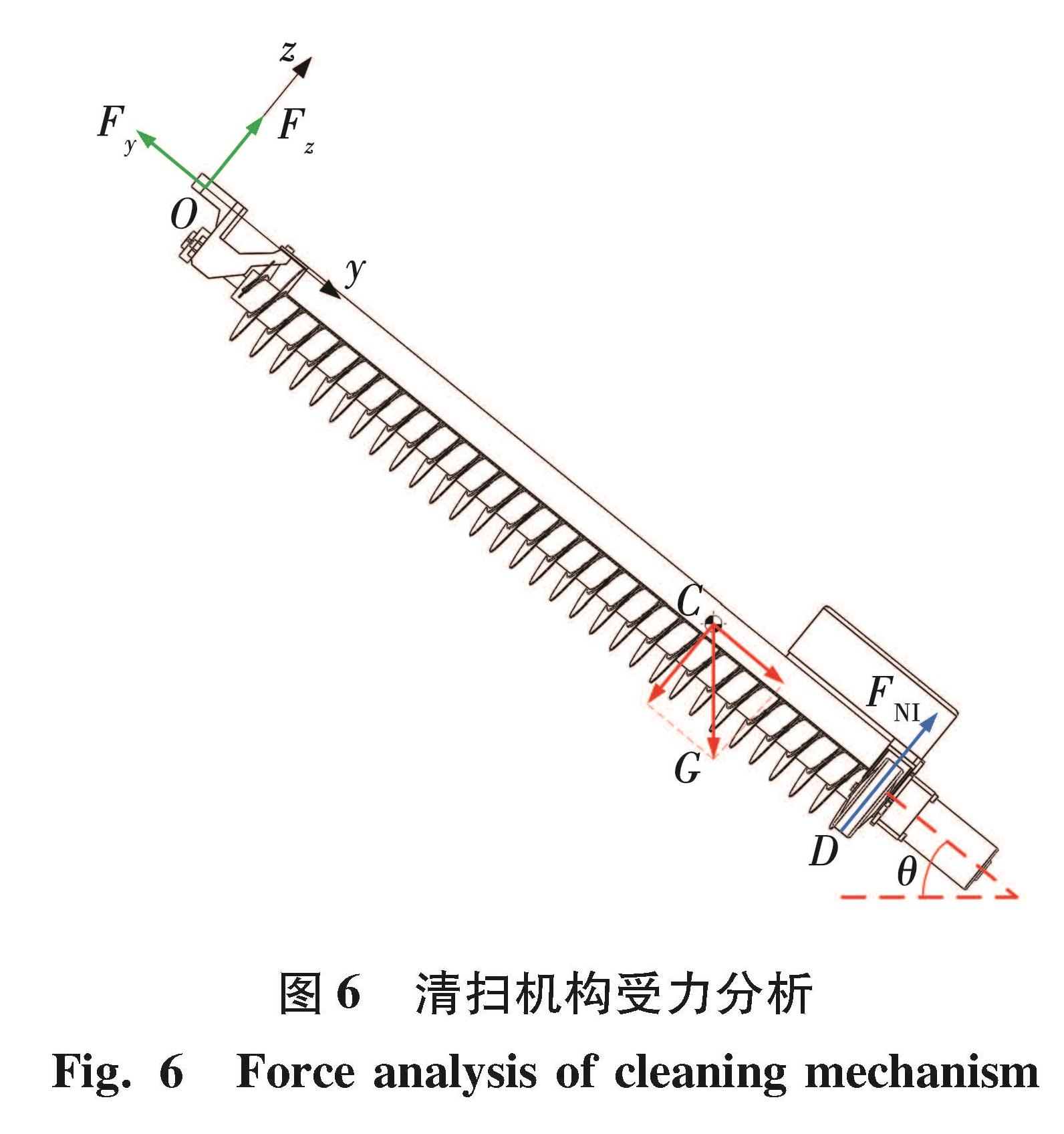
图6 清扫机构受力分析
Fig.6 Force analysis of cleaning mechanism
通过受力分析建立力系平衡方程为
式中:Fy、Fz──螺栓连接处的两个分力;
G──清扫机构重力;
yC、zC──质心C的坐标;
FN1──光伏组件对清扫机构的支撑力;
yD──支撑点D的y轴坐标。
通过SolidWorks软件得到清扫机构质量约为15.3 kg,质心C坐标为(0 mm,754 mm,-13.5 mm),由式(1)可得Fz为15.3 N、Fy为96.7 N,分力方向如图6所示,由此可得清扫机构对支撑架的反作用力与两个分力大小一致、方向相反。
3.2.2 同步履带压轴力同步履带工作时发生弹性形变产生紧边拉力和松边拉力,两者的矢量和即压轴力,作用于传动轴上,通过力传递作用于支撑架。由2.1节可知同步履带带速v1,则压轴力F为[12]
式中:Pd──设计功率,kW;
Pm──名义功率,kW;
KA──载荷修正系数。
清洁机器人每天运行约2 h,根据GB/T 11362—2021标准,载荷修正系数KA取1.2。假设机器人运行速度为15 m/min,则由电机扭矩和转速曲线图可得电机名义功率Pm约为0.043 kW,由式(2)计算出同步履带压轴力约为202 N。
3.2.3 张紧机构预紧力为防止机器在运行时出现空转,同步履带牵引力必须大于各种阻力之和且小于同步履带在光伏板表面的附着力,而机器人工作在倾斜的光伏板上,考虑到同步履带附着力会小于牵引力,因此设置张紧机构以增加附着重量。同步履带在光伏板表面的附着系数为φ,机器人在光伏板表面的附着重量为Gφ,方向垂直于光伏板,则同步履带在光伏板上的附着力Pφ为[13]
Pφ=φGφ。(3)
由2.1节可知同步带轮直径为d1,行走电机输出扭矩为M1,则同步履带牵引力FT为
FT=(2η1η2M1)/(d1),(4)
式中:η1──弹性联轴器传动效率;
η2──履带驱动段的效率。
由式(3)、(4)可以计算出同步履带在光伏面板上的附着力为150.9 N,当同步履带带速为12~20 m/min时,根据电机扭矩图和减速比可以计算出同步履带牵引力约为125.7~165.2 N。基于此,张紧机构的预紧力取100 N,此时附着力约为180.9 N,满足上述要求。
3.3 静力学仿真根据上述受力分析对模型进行加载,通过静力学求解得到支撑架的应力形变云图(图7),支撑架所受最大等效应力12.344 MPa远小于材料的屈服强度,最大总变形0.046 mm,通过SolidWorks软件评估得到支撑架质量为11.5 kg,具有较大优化空间。
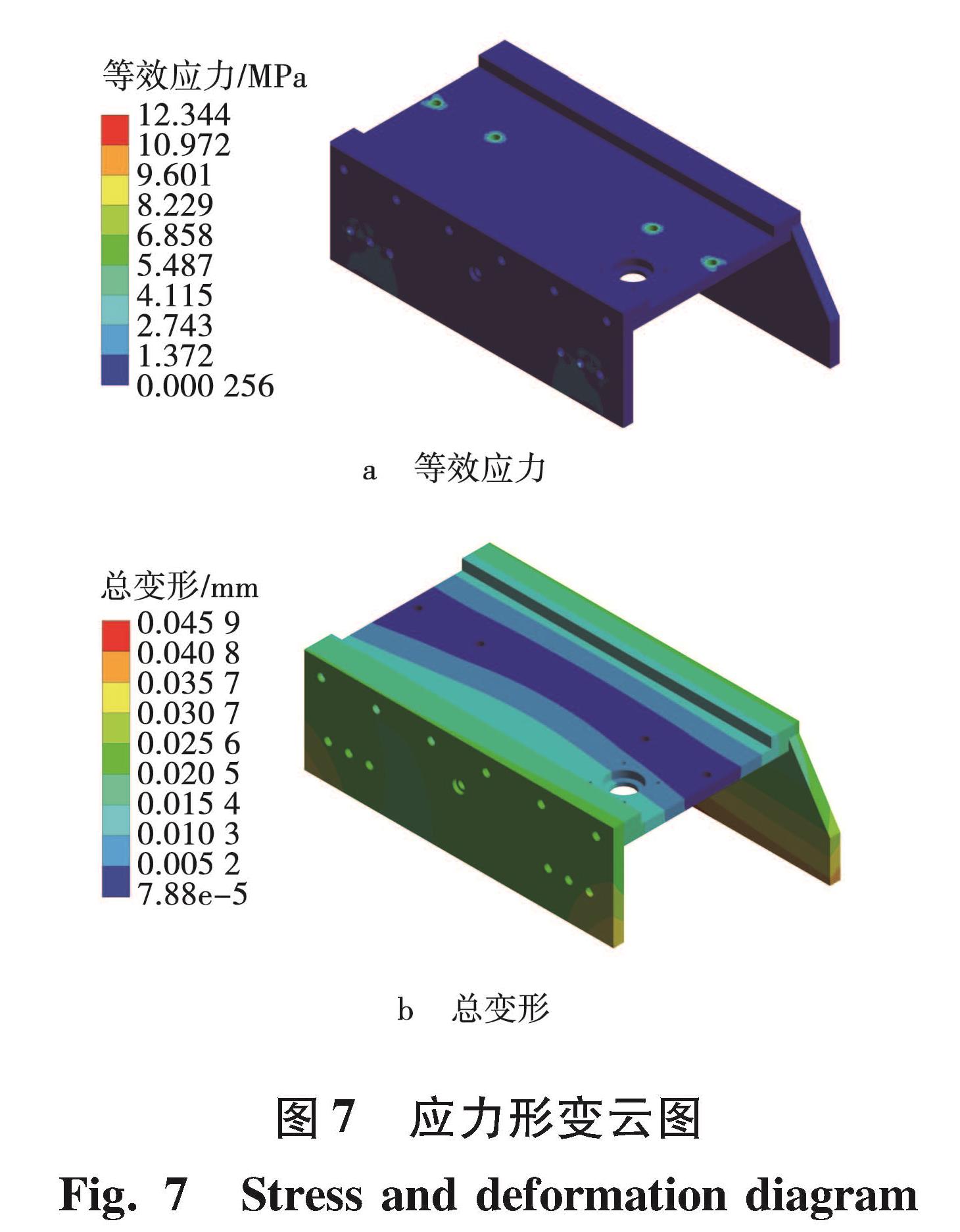
图7 应力形变云图
Fig.7 Stress and deformation diagram
4 支撑架拓扑优化设计4.1 拓扑优化理论基础
拓扑优化通过合理的材料分布,在满足规定的载荷、性能和约束条件下,获得最优的结构配置。相比于形状和尺寸优化,拓扑优化以材料分布为优化对象,设计空间较大[14]。
拓扑优化原理为变密度法,将网格单元相对密度作为设计变量,建立单元相对密度和材料弹性模量之间的关系,使其相对密度位于[0,1]区间,通过插入惩罚因子使单元相对密度趋于0或1,0和1用于表示单元的去除和保留,进而在质量或体积约束条件下得到结构柔度最小的最优材料分布方案。变密度法优化方法的数学模型为[15]
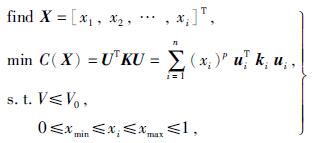
式中:X──设计变量;
xi──离散单元i的相对密度(i=1,2,…,n);
C(X)──目标函数,一般表示结构柔度;
U──结构的整体位移矩阵;
K──结构的整体刚度矩阵;
ui、ki──单元i的位移矩阵和刚度矩阵;
p──惩罚因子;
n──设计变量数量;
V──结构体积;
V0──约束体积;
xmin、xmax──设计变量的下限和上限。
4.2 拓扑优化过程根据上述原理对支撑架进行拓扑优化,收敛精度设为0.1%,惩罚因子取为3,优化区域为模型整体,排除区域为所有载荷边界条件,优化目标为柔度最小化,响应约束为保留45%的体积,加工约束为沿x轴对称,经过20次优化迭代后,目标函数趋于收敛。
模型优化结果如图8所示,其中红色区域为已删除部分,灰色区域为保留部分。以优化后的模型为参考对支撑架重新建模后,对其进行静力学求解,拓扑优化后模型应力和形变云图如图9所示,其所受的最大等效应力为14.68 MPa,远小于其许用应力120 MPa(安全系数取2),最大总变形为0.055 mm,满足设计要求。
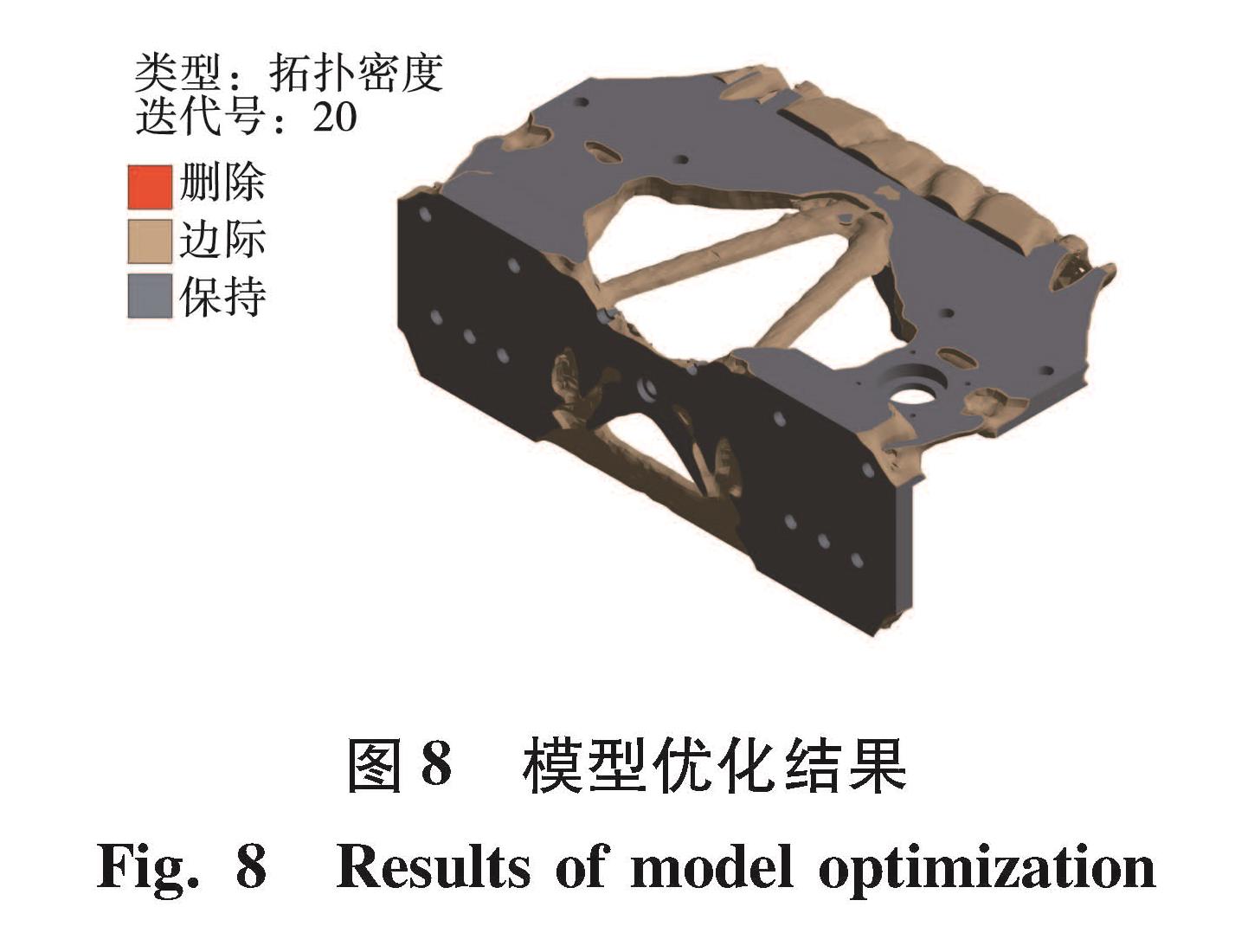
图8 模型优化结果
Fig.8 Results of model optimization
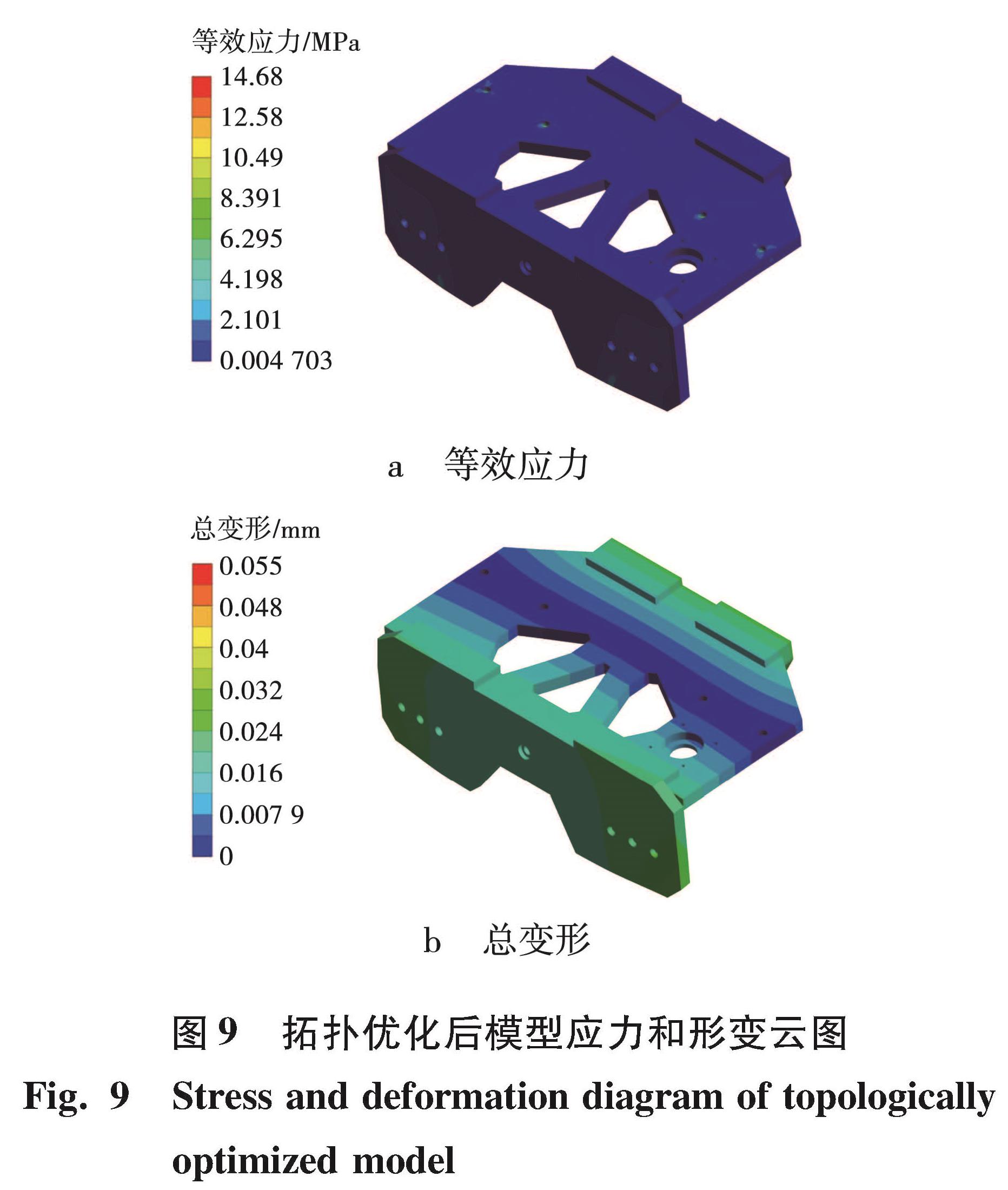
图9 拓扑优化后模型应力和形变云图
Fig.9 Stress and deformation diagram of topologically optimized model
5 支撑架响应面优化设计
上述拓扑优化用于改良模型结构,响应面优化可以获得模型的最优尺寸。考虑到拓扑优化后的模型尺寸参数增多,计算量显著增大,在此采用参数灵敏度分析选取相关性大的输入变量作为响应面优化的设计变量。
响应面优化设计首先使用CCD试验设计法生成设计变量样本点,然后选取Kriging模型对样本点进行拟合得到响应面模型,再对响应面模型使用多目标优化获得设计变量候选点,最后分析验证候选点以确定支撑架的最优尺寸,实现模型的尺寸优化。
5.1 参数灵敏度灵敏度分析的原理是通过研究和分析一个系统(或模型)的状态或输出变化对系统参数或周围条件变化的敏感程度,来确定哪些参数对系统或模型有较大的影响,通过灵敏度分析可以减少输入参数的个数,达到系统高效优化的目的[16]。在ANSYS软件中将模型尺寸和静力学仿真结果分别作为输入输出变量,并设置相关参数,最后通过求解分析选取灵敏度较大的输入变量作为响应面设计变量。文中采用斯皮尔曼法(Spearman)生成输入变量样本点,其数量一般为变量个数的10倍以上,经拓扑优化后的模型输入变量个数为20,分别编号P1~P20,其中8个具有相关性,即共有12个输入变量,故样本点数量设为120,相关性阈值设为0.5,灵敏度分析结果如图 10所示。
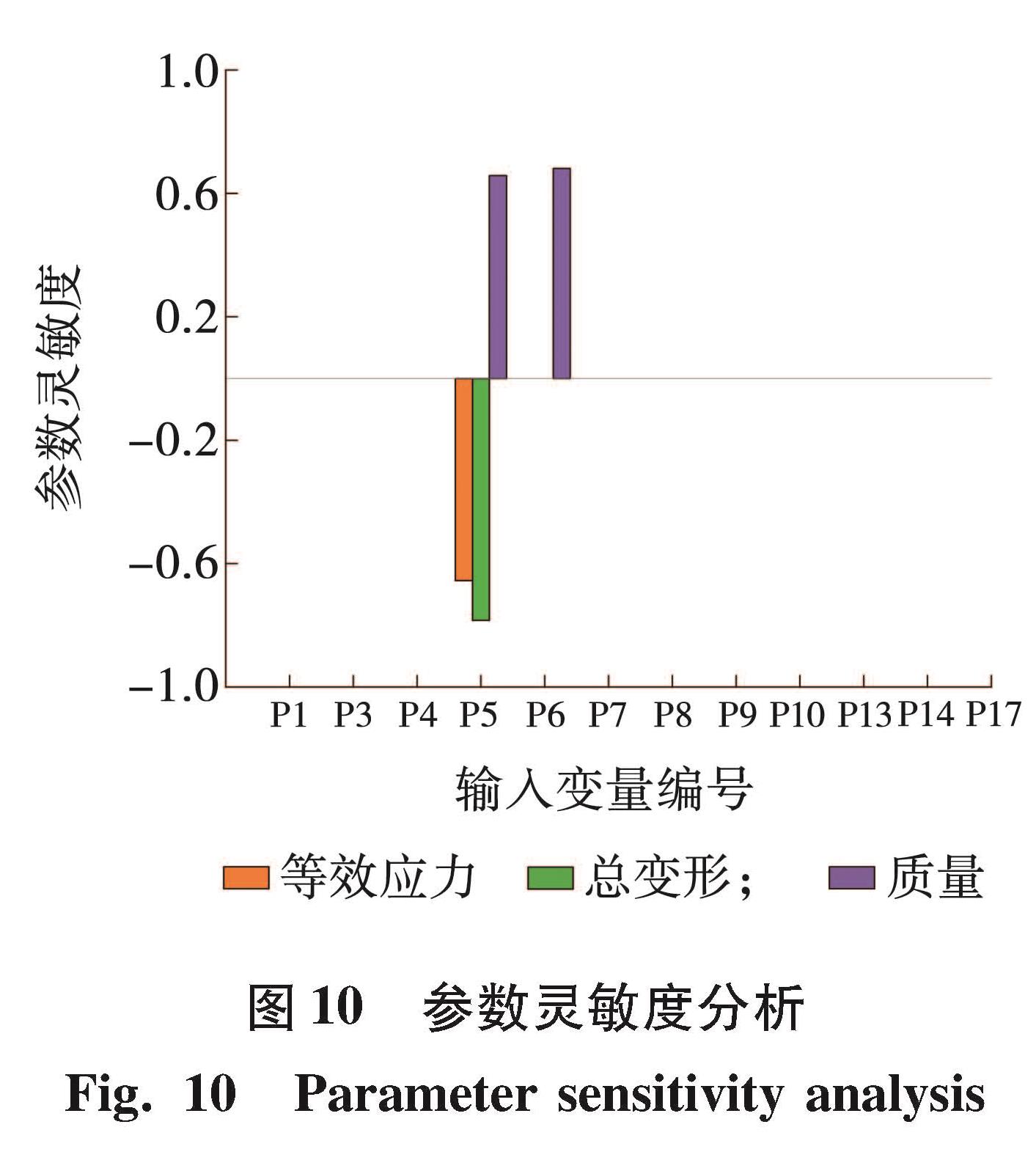
图 10 参数灵敏度分析
Fig.10 Parameter sensitivity analysis
从图 10可以看出,支撑架零部件厚度P5对应力形变和质量的影响均较大,支撑架零部件长度P6对质量的影响较大。
5.2 响应面模型建立根据参数灵敏度分析可以确定响应面模型的设计变量,考虑到支撑架零部件长度相互关联,所以共有5个设计变量如表3所示,其中hq为前支撑板厚度,lq为前支撑板长度,lsh为上支撑板后侧长度,hs为上支撑板厚度,lsq为上支撑板前侧长度,hh为后支撑板厚度,lh为后支撑板长度,分别对应变量编号P1~P7,lq与lsq相关联,lh与lsh相关联,设计变量的上下限值一般为初始值的90%~110%,考虑到安装尺寸要求,这里在表3中给出各个设计变量的上下限值,设计变量示意图如图 11所示。
表3 响应面模型的设计变量
Table 3 Design variables of response surface model
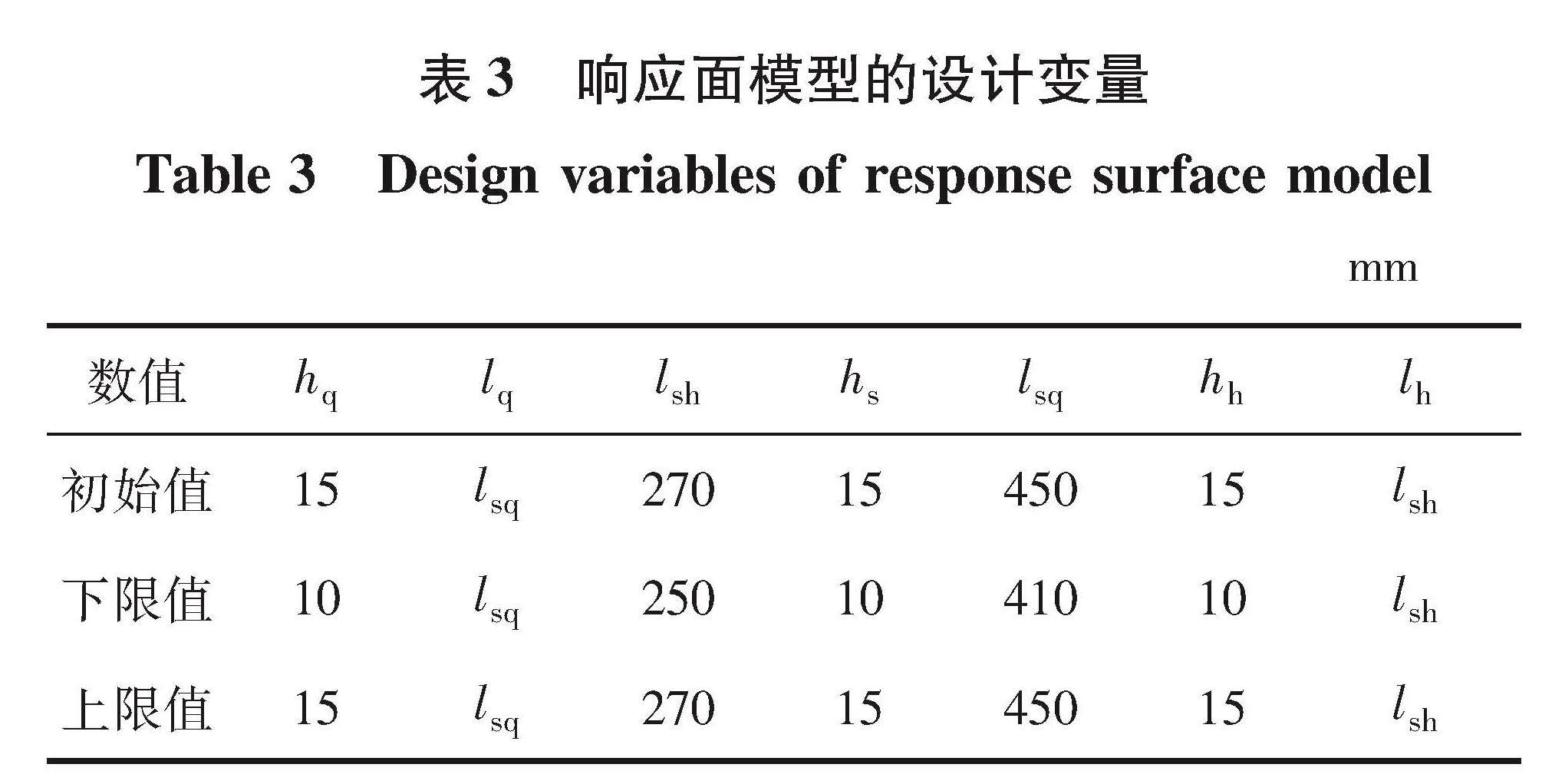
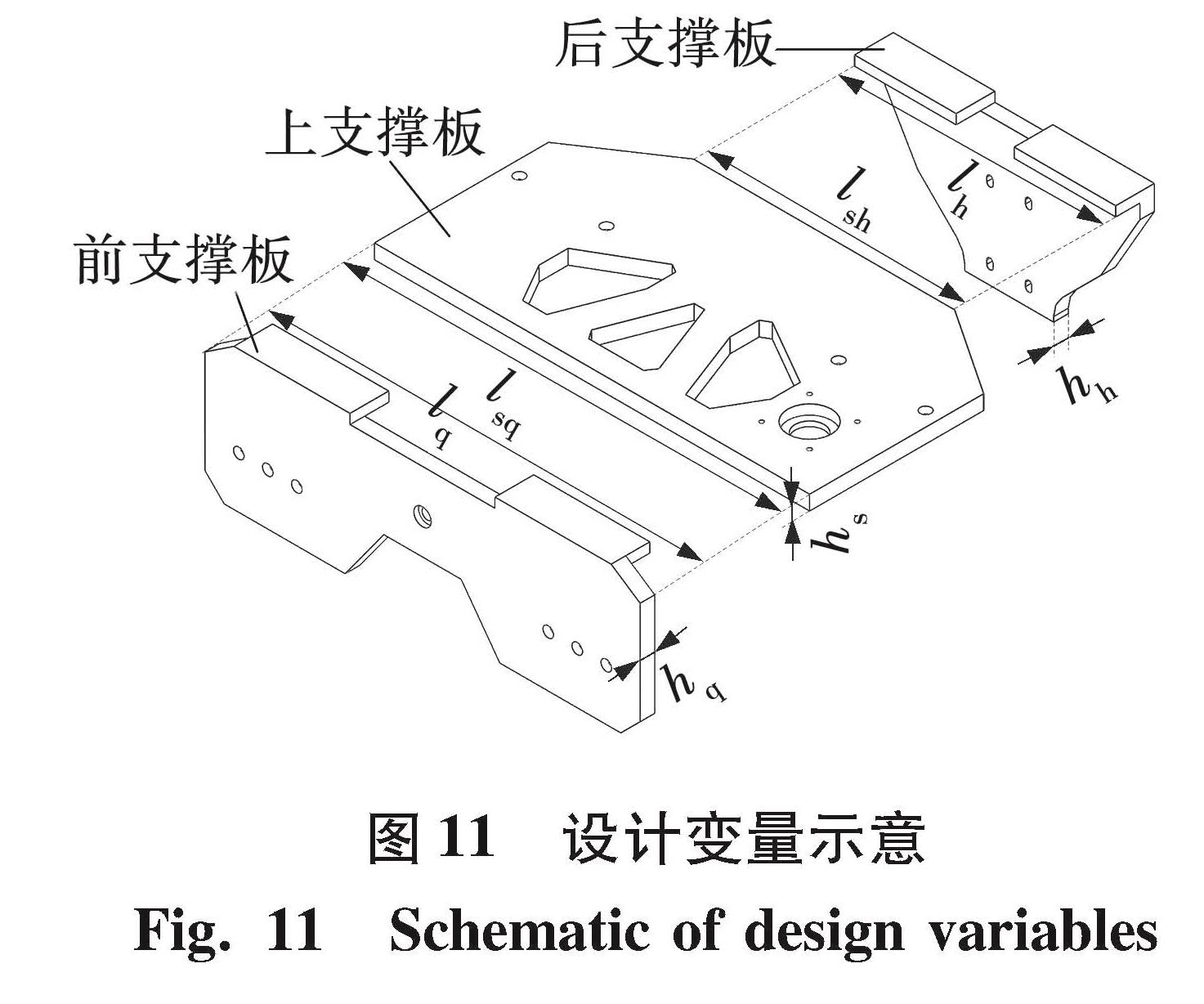
图 11 设计变量示意
Fig.11 Schematic of design variables
为了得到设计变量和响应目标之间的关系,利用CCD试验设计法生成27个设计变量样本点和41个细化样本点,对样本点回归拟合建立响应面模型。通过对比不同类型的响应面模型拟合精度,选取全局拟合精度较高的Kriging模型[17]为
式中: ──线性回归模型;
──线性回归模型;
fi(x)──多项式基函数;
βi──相关参数;
x──变量样本点矩阵;
n──多项式数量;
Z(x)──基于数据空间相关性建立的随机过程模型。
响应面模型建立后,随机选取15个验证点来检验模型的拟合精度,其响应面拟合精度曲线如图 12所示,响应面预测值和设计点观察值基本位于同一直线上,说明模型拟合精度良好。
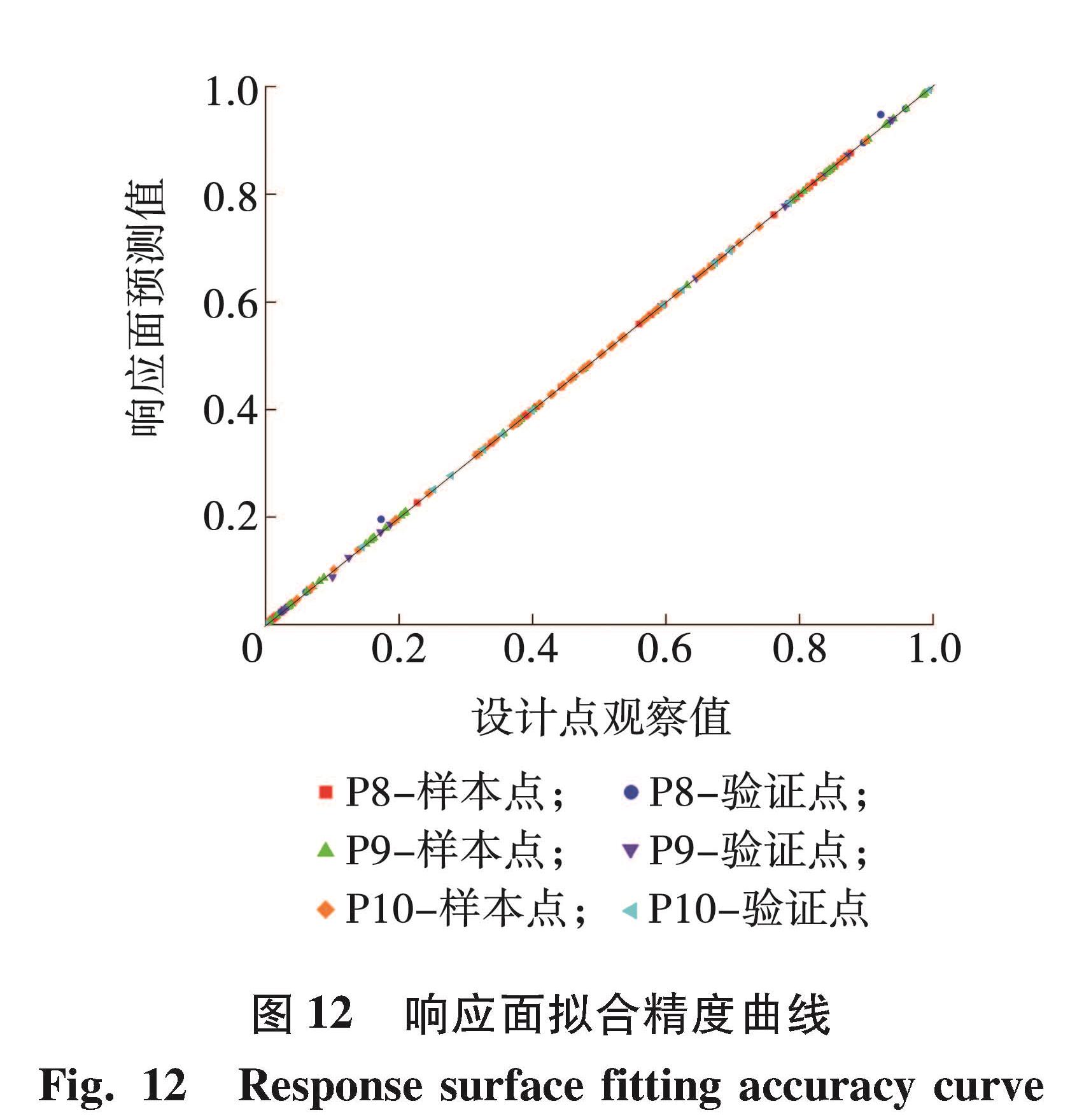
图 12 响应面拟合精度曲线
Fig.12 Response surface fitting accuracy curve
5.3 多目标优化设计
建立响应面模型后,可将其视为多目标优化的目标函数,多目标优化问题一般为多个目标函数在相同约束条件下同时优化的问题,通常有多组最优解满足条件,即Pareto最优解集。在这以等效应力Fmax和质量m最小化为优化目标,约束条件为设计变量的上下限,优化的数学模型为
式中:Pi──第i个设计变量(i=1, 2,…,n);
PUi、PLi──设计变量上、下限值,具体数值如表3所示。
在ANSYS软件中选用MOGA多目标遗传算法进行响应面优化设计,其本质是非支配排序的遗传算法(NSGA-II),首先根据初始样本数量在约束条件下随机产生初始种群即通过响应面模型计算得到的不同设计点,非支配排序后通过遗传算法的选择、交叉、变异等操作得到第一代子代种群; 接着,将父代种群与子代种群合并后进行快速非支配排序,同时对每个非支配层中的个体进行拥挤度计算,根据非支配关系以及个体的拥挤度选取合适的个体组成新的父代种群; 最后,通过遗传算法的基本操作产生新的子代种群,不断循环直到满足程序结束的条件,得到Pareto最优解集,将最优解集中各候选点对比分析得到Pareto最优解,算法流程如图 13所示。
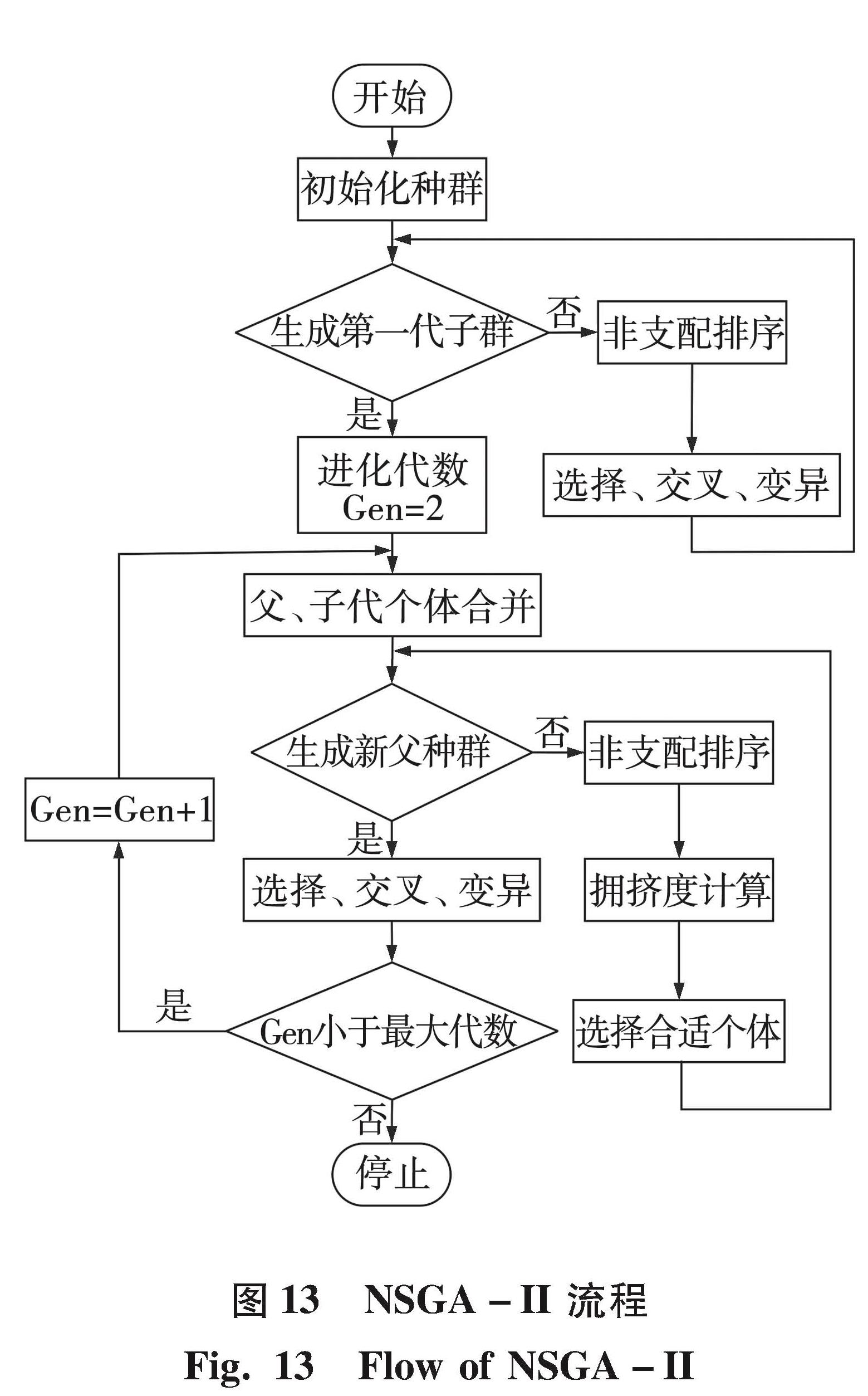
图 13 NSGA-II 流程
Fig.13 Flow of NSGA-II
在ANSYS软件中对MOGA多目标遗传算法参数进行设置,初始样本点数量设为5 000,每次迭代的样本数量为1 000,最大许用Pareto百分比为70%,优化收敛稳定百分比为2%,最大迭代次数为20次。样本点经过10次优化迭代后收敛,收敛稳定百分比为1.72%,Pareto解集如图 14所示,其中σ8为支撑架所受等效应力,其相对变化率为γ1; s9为支撑架总变形,其相对变化率为γ2; m10为支撑架质量,其相对变化率为γ3,分别对应变量编号P8~P10。球体的不同颜色代表优化结果的优劣,蓝色代表Pareto最优解集,红色代表的是最劣解集。
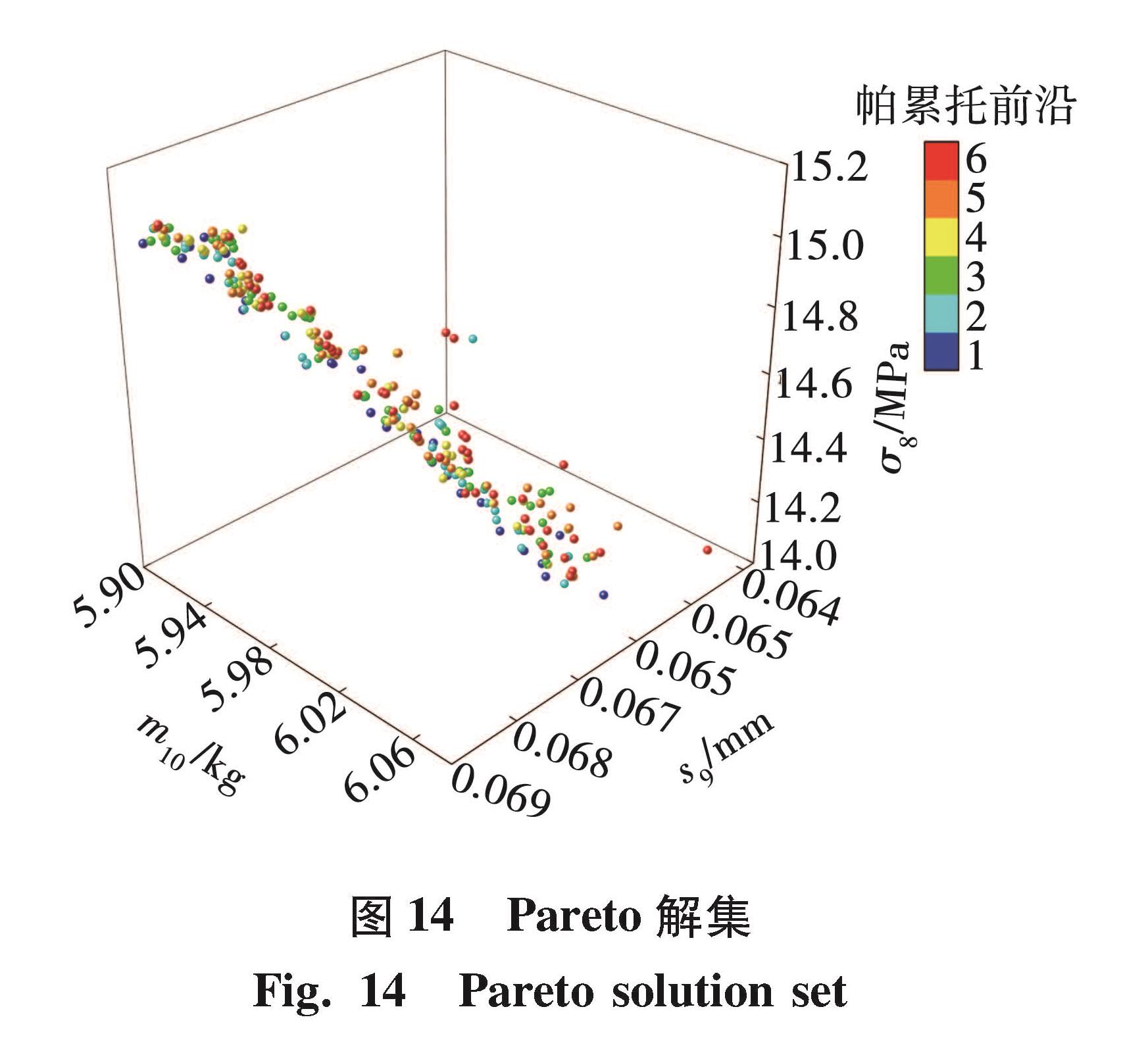
图 14 Pareto解集
Fig.14 Pareto solution set
5.4 优化结果
以拓扑优化后模型即原始点作为参考点,设计变量候选点的响应目标值对比如表4所示。
表4 设计变量候选点对比
Table 4 Design variable candidate point comparison
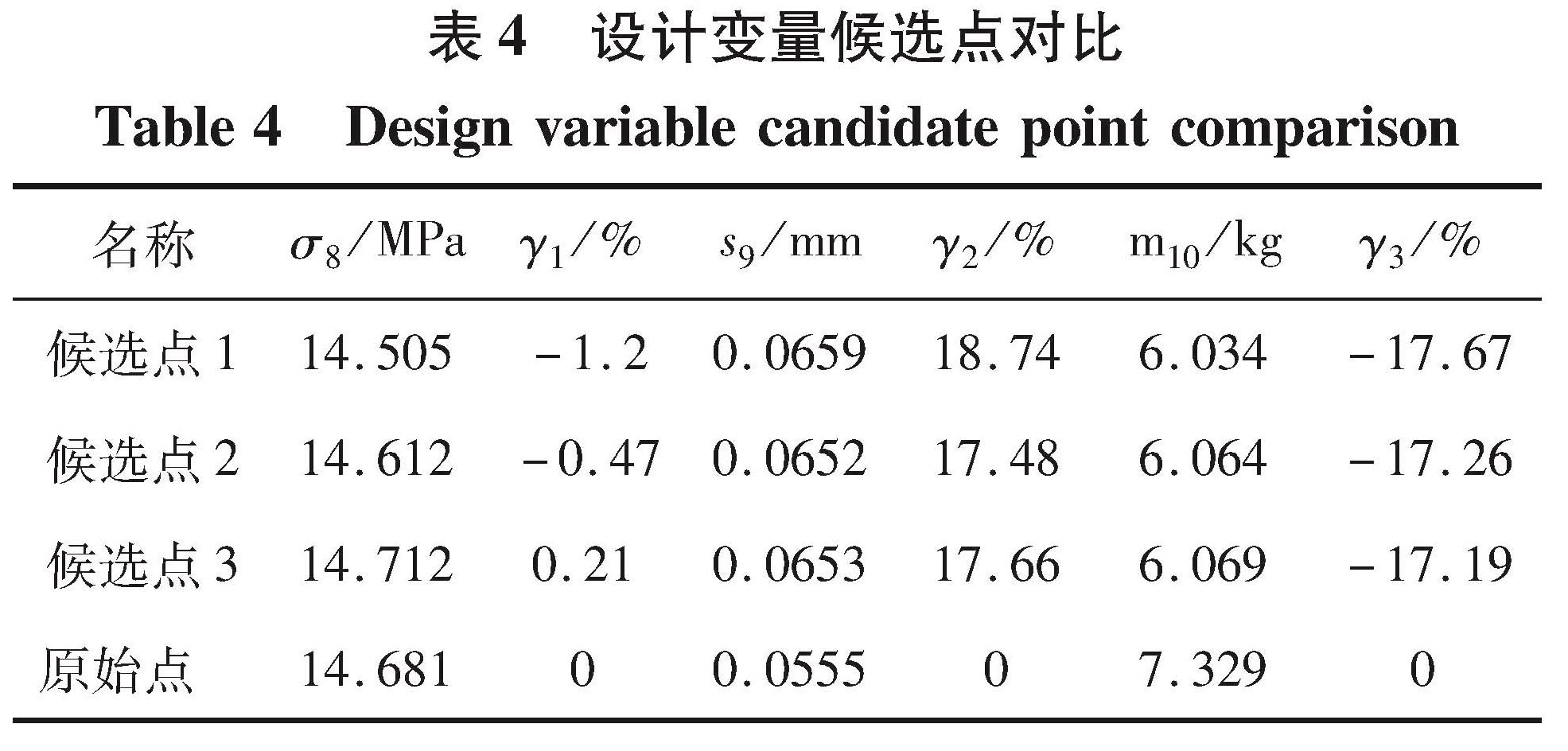
从表4中可以看出,候选点3的最大等效应力相对于原始点有所增加,而候选点1和2的结果较好,其中候选点1最大等效应力降低了1.2%,质量降低了17.67%,候选点2最大等效应力降低了0.47%,质量降低了17.26%,两个候选点的总变形均满足设计需求,通过对比确定候选点1为Pareto最优解。优化结果如表5所示,考虑到机械加工尺寸一般较为规整,这里需要将候选点1的尺寸圆整化,对尺寸圆整后的支撑架模型进行静力学求解得到其所受最大等效应力为14.562 MPa,最大总变形为0.066 mm,质量为6.025 kg。
表5 优化结果
Table 5 Optimization results
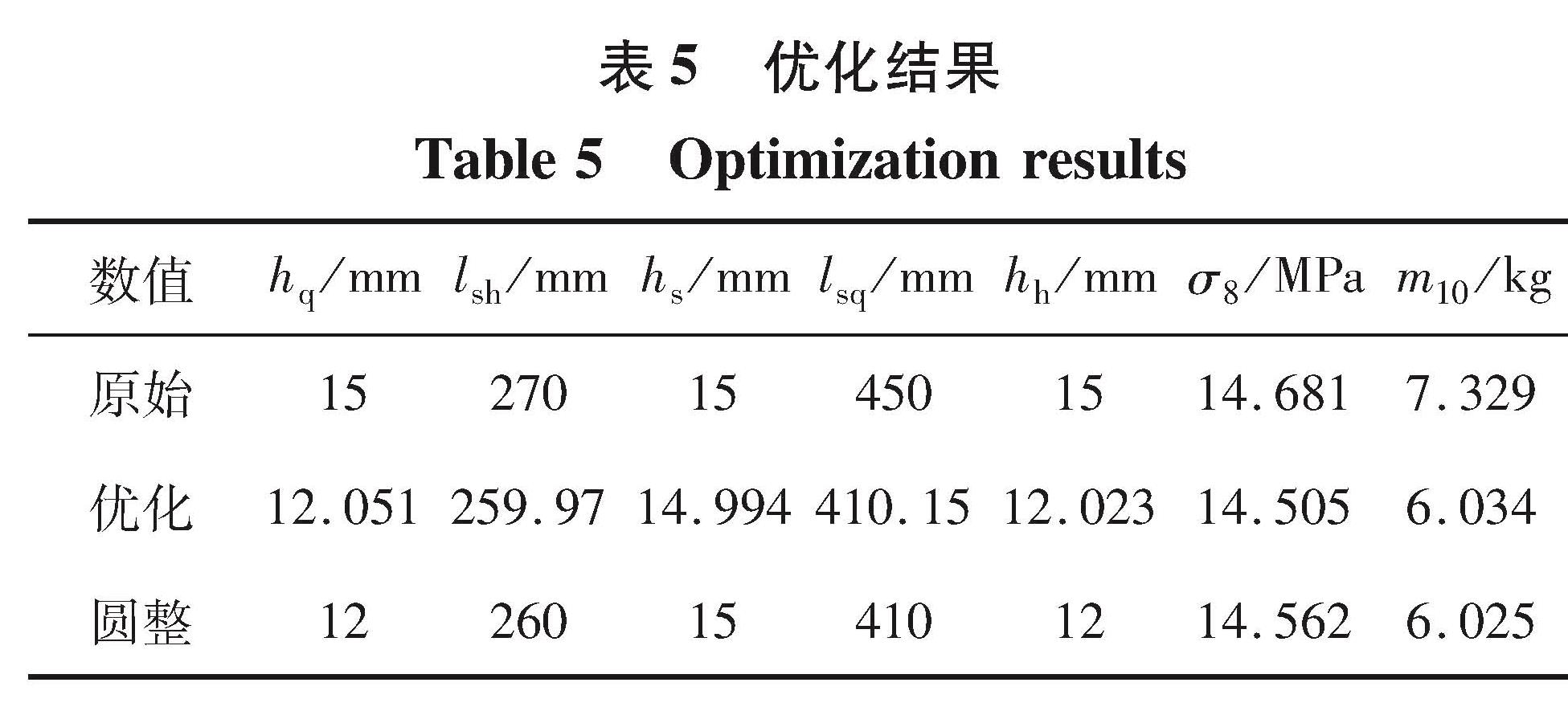
支撑架原始模型质量为11.5 kg,总变形为0.046 mm,所受等效应力为12.344 MPa; 拓扑优化后的模型质量为7.329 kg,总变形为0.055 mm,所受等效应力为14.68 MPa; 拓扑优化结合响应面优化后的模型质量为6.025 kg,总变形为0.066 mm,所受等效应力为14.56 MPa,拓扑优化结合响应面优化后的模型质量相对于原始模型质量降低了47.6%,而所受等效应力和变形均满足设计需求,说明该方法在保证机器人零部件强度和刚度的同时,可以有效地降低机器人整机重量。
6 实验分析为了验证机械结构设计的合理性和控制系统的有效性,对物理样机进行运行和积灰清扫测试,首先将两块光伏组件固定在光伏支架上,光伏组件之间板面平整、板端对齐,光伏支架倾斜角度为30°,将物理样机安装至光伏阵列左端。随后对机器人行走速度进行测试,机器人以3 m/min的速度进行运动,机器启动时进行计时,机器人运动停止后结束计时,并记录机器人运行距离,多次重复试验得到10组数据如表6所示。
表6 机器人理想状态运行测试数据
Table 6 Test data of robot operation in ideal state
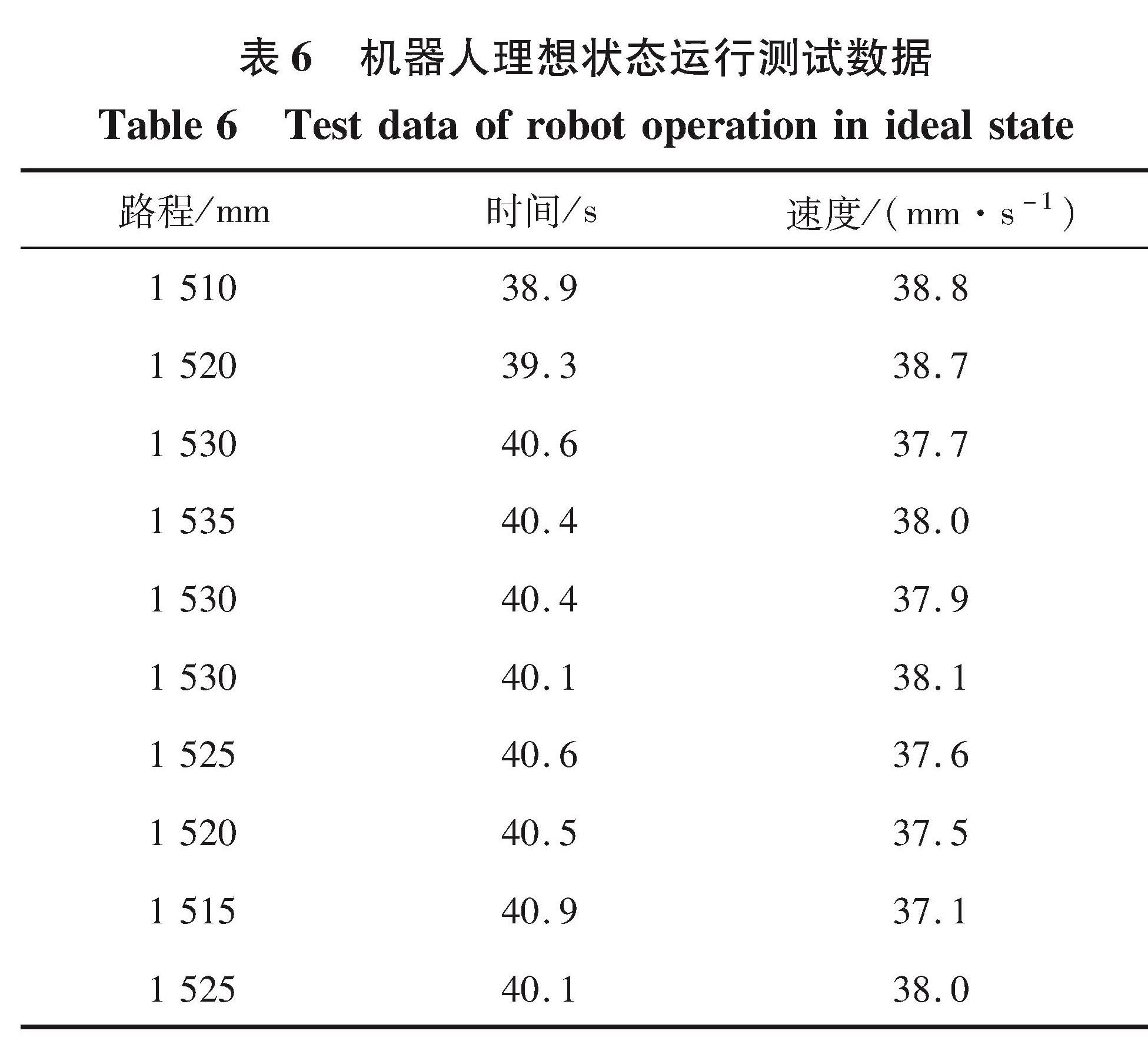
由于电机带负载运动,故机器人实际运行速度小于其空转速度3 m/min,由上述实验数据可以得到机器人行走速度均值为37.9 mm/min,机器人运行平稳未出现空转现象。
为了验证机器人清洁效果,机器人在理想工况下进行除尘实验,实验在封闭环境中进行,使用松竫精密天平(精度为0.001 g)称取4.68 g的细灰,通过抖动筛网使其自然沉降在900 mm×650 mm的光伏组件表面区域,通过改变机器人的行走速度和清扫速度进行多次除尘实验,如图 15所示。
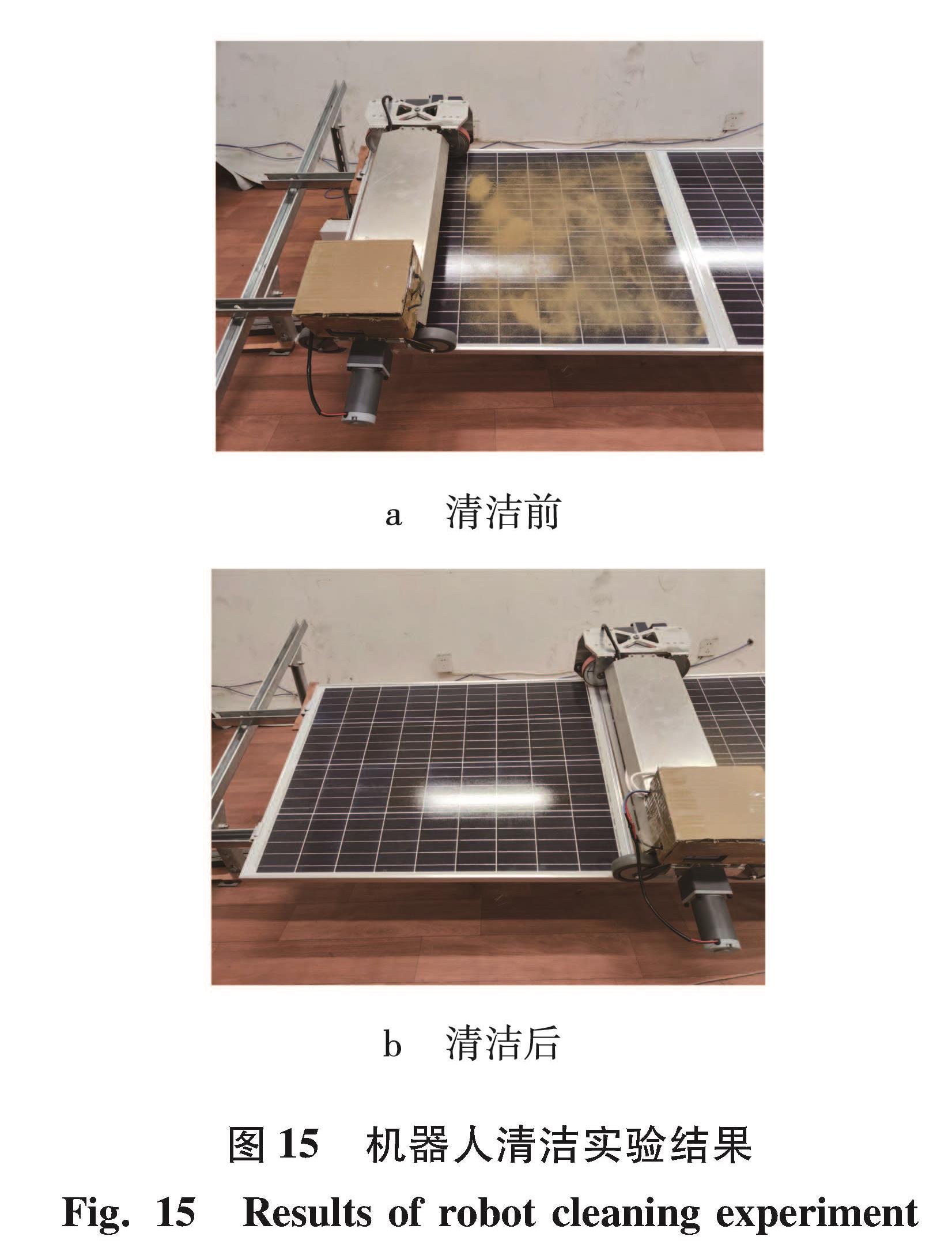
图 15 机器人清洁实验结果
Fig.15 Results of robot cleaning experiment
利用羊毛刷收集清洁后的光伏组件表面残留的细微灰尘,计算清理的积灰重量与初始积灰重量的百分比即为机器人的除尘率,如图 16所示。
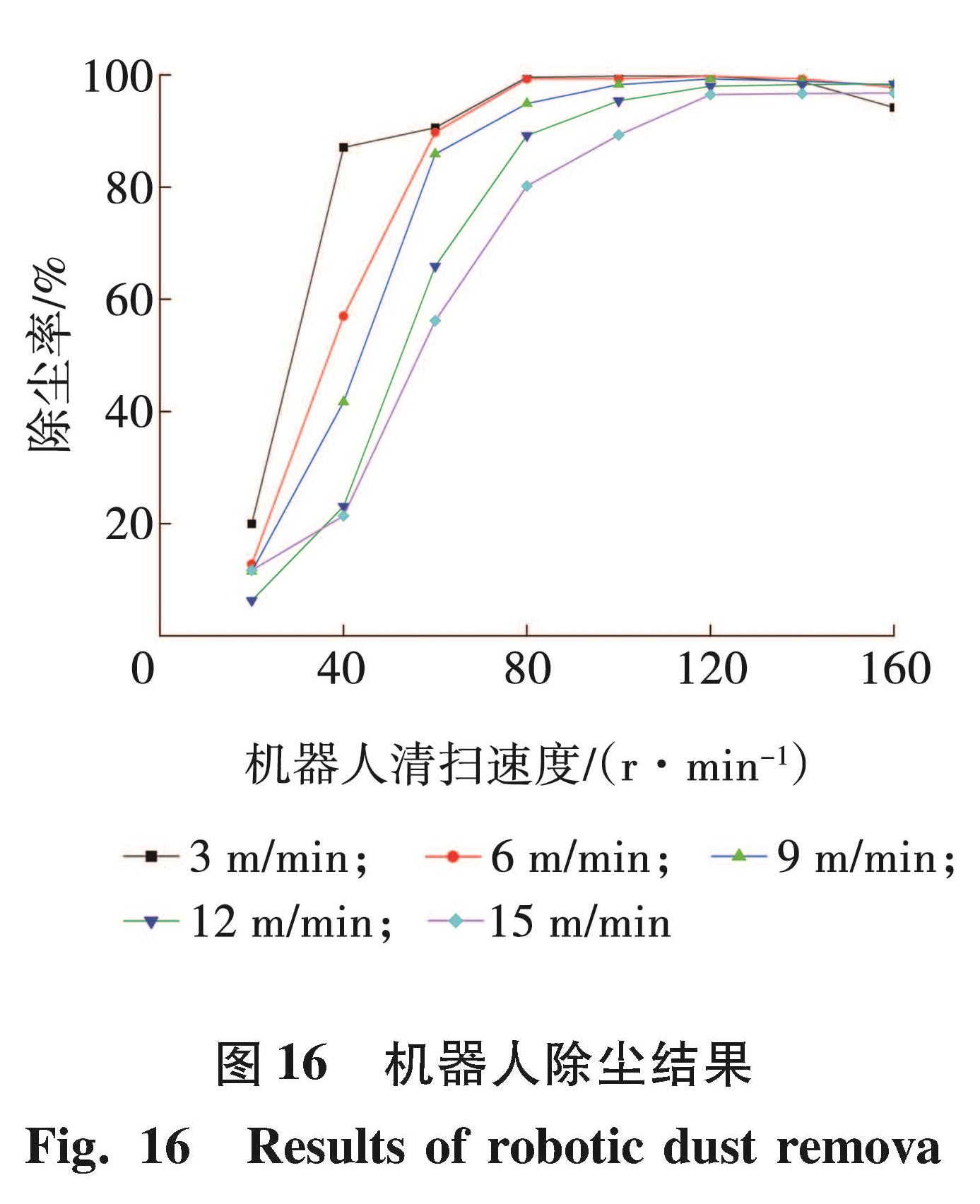
图 16 机器人除尘结果
Fig.16 Results of robotic dust remova
图 16中不同颜色的点线代表机器人在不同行走速度下,其除尘率随着清扫速度变化趋势,由图 16可知机器人除尘率随着机器人清扫速度的增大先迅速增大再缓慢减小,当清扫速度达到120 r/min时,无论机器人行走速度多大,均可以取得较好的除尘效果; 当清扫速度保持不变时,较小的行走速度有利于提高除尘率。当机器人行走速度为3 m/min,清扫速度为120 r/min时,机器人除尘率高达99.8%; 当机器人以15 m/min运动时,机器人除尘率能达到96.8%,说明机器人的除尘效果良好。
7 结 论(1)在框架式清洁机器人结构基础上,提出一种半框架式清洁机器人设计方案,通过分析计算得到机器人整机设计参数。
(2)以行走机构支撑架为研究对象,提出一种拓扑优化结合响应面优化的轻量化方法,优化后的支撑架模型质量相对于原始模型质量降低了47.6%。
(3)通过实验验证了机械结构设计的合理性,并且当机器人清扫速度达到120 r/min时,可以取得较好的除尘效果。
- [1] 曲宏伟, 王靖雯. 积灰对光伏板输出特性影响理论和试验研究[J]. 太阳能学报, 2018, 39(8): 2335-2340.
- [2] 刘 锋, 孙 震, 姚春利, 等. 光伏电池板清洁技术研究综述[J]. 清洗世界, 2016, 32(5): 26-29.
- [3] Patil P A, Bagi J S, Wagh M M. A review on cleaning mechanism of solar photovoltaic panel[C]. 2017 International Conference on Energy, Communication, Data Analytics and Soft Computing(ICECDS). IEEE, 2017.
- [4] Hou Y, Fu Y, Chen J. Analysis on dynamic feature of cross arm light weighting for photovoltaic panel cleaning device in power station based on power correlation[J]. Open Physics, 2020, 18(1): 492-503.
- [5] Antonelli M G, Zobel P B, Marcellis A D, et al. Autonomous robot for cleaning photovoltaic panels in desert zones[J]. Mechatronics, 2020, 68: 102372.
- [6] 王海峰, 李凤婷, 贾言争, 等. 适用于大规模光伏阵列的无水清扫机器人[J]. 可再生能源, 2015, 33(10): 1439-1444.
- [7] 王 龙, 王云霞, 陈健飞, 等. 光伏板清扫机器人支撑架轻量化优化设计[J]. 机械设计与研究, 2018, 34(4): 182-185.
- [8] 孙立新, 李峰亮, 董 鹏, 等. 磁吸附轮式擦窗机器人动力学建模与仿真[J]. 机械设计与制造, 2020(1): 256-259.
- [9] Zhang J, Wang S, Xin Y, et al. The cleaning force of solar panel based on flexible beam[J]. Energy Sources Part A Recovery Utilization and Environmental Effects, 2021(3): 1-22.
- [10] 毛柳伟, 王国庆. 小口径管道自适应内检测机器人研究[J]. 机械设计与制造, 2021(10): 229-232.
- [11] 陈 鑫, 赵康明, 沈传亮, 等. 电动车全铝框架式车身拓扑分析及参数化优化方法[J]. 同济大学学报(自然科学版), 2020, 48(10): 1470-1477.
- [12] 丁彩红, 李 梁. 适应高速化的地毯簇绒机主轴系统设计[J]. 东华大学学报(自然科学版), 2021, 47(5): 97-104.
- [13] 乔新勇, 靳 莹, 段 誉. 基于履带环影响和功率谱方法的履带车辆振动响应分析[J]. 振动与冲击, 2021, 40(18): 94-101.
- [14] 王子宁, 伍建军, 向健明, 等. 基于拓扑优化与6σ稳健性的检修工装支撑座轻量化设计[J]. 机械强度, 2020, 42(1): 94-101.
- [15] 任毅如, 向剑辉, 杨玲玲, 等. 干片式制动器支撑结构的拓扑优化方法[J]. 北京理工大学学报, 2022, 42(1): 19-27.
- [16] 李军民, 何 仁. 基于参数敏感度的双转子轮毂电动机优化设计与特性分析[J]. 江苏大学学报(自然科学版), 2020, 41(6): 640-647.
- [17] 杨瑞刚, 高 林, 董 青, 等. 基于Kriging模型与NSGA-Ⅱ算法的堆垛机结构优化设计[J]. 机械设计与制造, 2022(5): 298-304.