 图 1 UKF-ADC方法原理
Fig.1 Principle of UKF-ADC method
图 1 UKF-ADC方法原理
Fig.1 Principle of UKF-ADC method
Wang Tao,Gong Yuefeng,Meng Liyan,et al.Unscented Kalman filter-based adaptive delay compensation method by real-time hybrid simulation[J].Journal of Heilongjiang University of Science & Technology,2023,33(02):281-286,293.[doi:10.3969/j.issn.2095-7262.2023.02.021]

实时混合试验(Real-time hybrid simulation,RTHS)自1992年由日本学者Nakashima[1]提出以来,受到结构试验领域的广泛重视。一般将结构中力学性能明确的部分作为数值子结构,而将其中具有强非线性、依赖于加载速率的部分作为物理子结构,通过数值子结构实时计算、物理子结构实时加载,保证结构的关键部位在外部激励下可以真实重现完整的动力响应,为结构性能评估提供了经济、实用的试验手段。受到软件条件和作动器动力特性的影响,系统不可避免地会引入时滞,包括计算时滞和物理加载时滞。其中,物理时滞为系统时滞的主要成分,即作动器收到位移指令与最终实现这一指令往往存在时间差。Horiuchi等[2]研究发现时滞影响等同于给系统引入负阻尼,可能导致试验结果发散,甚至威胁试验安全。
为有效解决系统时滞带来的不利影响,国内外学者提出了一系列补偿算法。多项式外插方法[2]自提出以来,因实施简单、补偿精度高,被广泛应用。Chen等[3]基于加载系统的一阶传递函数,提出了自适应逆补偿算法。Chae等[4]根据时间序列构造了自适应补偿算法,补偿系统的变时滞。Zhou等[5]在自适应时间序列补偿方法的基础上引入了线性二次高斯控制策略,通过实时混合试验的Benchmark模型验证了该方法具有较好的鲁棒性。Strano等[6]提出了一种自适应补偿方法,通过扩展卡尔曼滤波器在线识别系统参数,用于补偿伺服作动器动力延迟。Ning等[7]提出了基于卡尔曼滤波器的自适应补偿方法,开展了RTHS仿真验证。王贞等[8]提出了一种补偿实时混合试验变时滞的自适应方法(Adaptive delay compensation,ADC),采用带遗忘因子的递推最小二乘在线更新系统参数。王涛等[9]为研究高频信号加载下ADC方法的补偿性能,开展了黏滞阻尼器实时混合试验进行验证。李宁等[10]提出了时滞追踪的自适应时滞补偿方法,通过在线估计系统时滞,追踪系统的特性,实现自适应补偿。
传统的定时滞补偿技术难以对系统的变时滞进行有效补偿,为实现伺服作动器的精准控制,本文针对RTHS提出一种基于无迹卡尔曼滤波的自适应补偿(Unscented Kalman filter-based adaptive delay compensation,UKF-ADC)方法。首先给出该方法的原理及试验流程,然后以Benchmark模型[11]为对象开展虚拟RTHS,验证该方法对加载系统的补偿精度。
1 UKF-ADC方法基本原理在RTHS中,为了实现伺服作动器的实时加载,文中提出一种UKF-ADC方法,该方法原理如图1所示。首先采用UKF算法对伺服加载系统的模型参数进行在线识别,然后利用时滞补偿器对系统变时滞进行自适应补偿。伺服加载系统采用一阶连续传递函数描述[6]。首先在每个积分步长内,系统模型参数基于伺服作动器命令位移 和物理子结构实测位移 通过UKF算法在线估计,然后更新自适应补偿器,最后对命令位移 进行时滞补偿。当位移加载指令不超过50 Hz的频率时,可以忽略高频影响,一阶模型被认为足以代表伺服系统[6,12]。
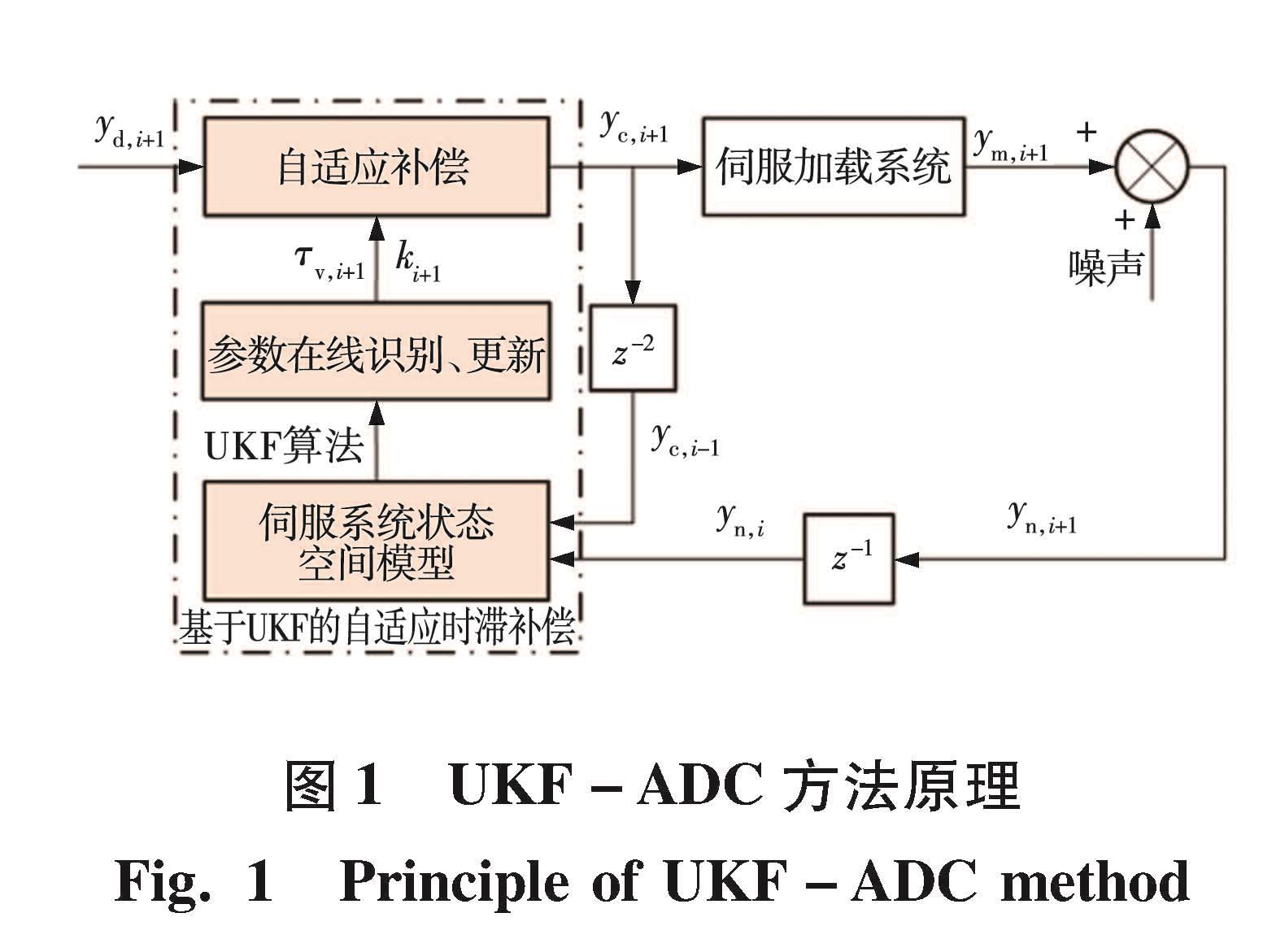
图1 UKF-ADC方法原理
Fig.1 Principle of UKF-ADC method
1.1 时滞补偿
文中采用一阶连续传递函数[6]模拟伺服加载系统,系统传递函数GP(s)为
GP(s)=k/(τvs+1),(1)
式中:τv——时间参数;
k——幅值增益;
s——拉普拉斯算子。
对伺服系统GP(s)取逆,建立自适应补偿器模型Gc(s)为

式中:Yc(s)——伺服加载系统命令位移yc的拉普拉斯变换;
Yd(s)——伺服加载系统期望位移yd的拉普拉斯变换。
将式(2)转化为时域连续方程,在离散域中得到

将式(3)中y·d,i+1进行后向差分,得到补偿位移yc,i+1为

式中:yd,i+1——第i+1步期望位移,通过逐步积分算法计算得到;
ki+1、τv,i+1——第i+1积分步的未知参数,可通过识别方法在线估计参数值,详见1.2节。
1.2 参数识别文中采用UKF算法[13]对式(10)中的非线性状态Xi进行在线识别。对伺服系统GP(s)进行拉普拉斯逆变换转化为时域连续方程,在离散时域中表示为

将 进行前向差分,得到第i积分步实测位移ki为
进行前向差分,得到第i积分步实测位移ki为

选定离散方程式(6)中的ym,i、τv,i、ki组成下式的系统状态向量。
 (7)
(7)
式中,x1,i、x2,i、x3,i——第i积分步状态向量Xi的第1行、第2行和第3行的值。
结合式(6)、式(7)转换成以下状态空间形式
 (8)
(8)
式中:yc,i-1——多项式外插法第i-1积分步的位移输入指令,作为伺服系统GP(s)的输入;
w1,i-1、w2,i-1、w3,i-1——零均值的高斯白噪声。
引入观测方程
zi=x1,i+vi,(9)
式中:zi——第i积分步测量值;
vi——第i步的测量噪声。
将式(8)、式(9)以非线性状态方程和观测方程表示为
Xi=f(Xi-1,yc,i-1)+Wi-1,
Zi=h(Xi)+Vi,
Wi-1=[w1,i-1 w2,i-1 w3,i-1]T,
Vi=vi,
式中:Zi——第i积分步的系统观测向量;
f——状态方程;
h——观测方程;
Wi-1、Vi——过程噪声、系统观测噪声,均为零均值的高斯白噪声。
2 实时混合试验Benchmark问题2.1 Benchmark模型为了推进RTHS领域发展,Silva等[11]在RTHS中建立了一个Benchmark问题,作为一种评价RTHS时滞补偿性能的有效、通用基准模型,被广泛应用,其原理如图2所示。在Benchmark问题中,伺服系统-液压传递系统的模型、传感和控制实现硬件、控制-结构交互和物理子结构均通过MATLAB中的传递函数进行建模,如图3所示。
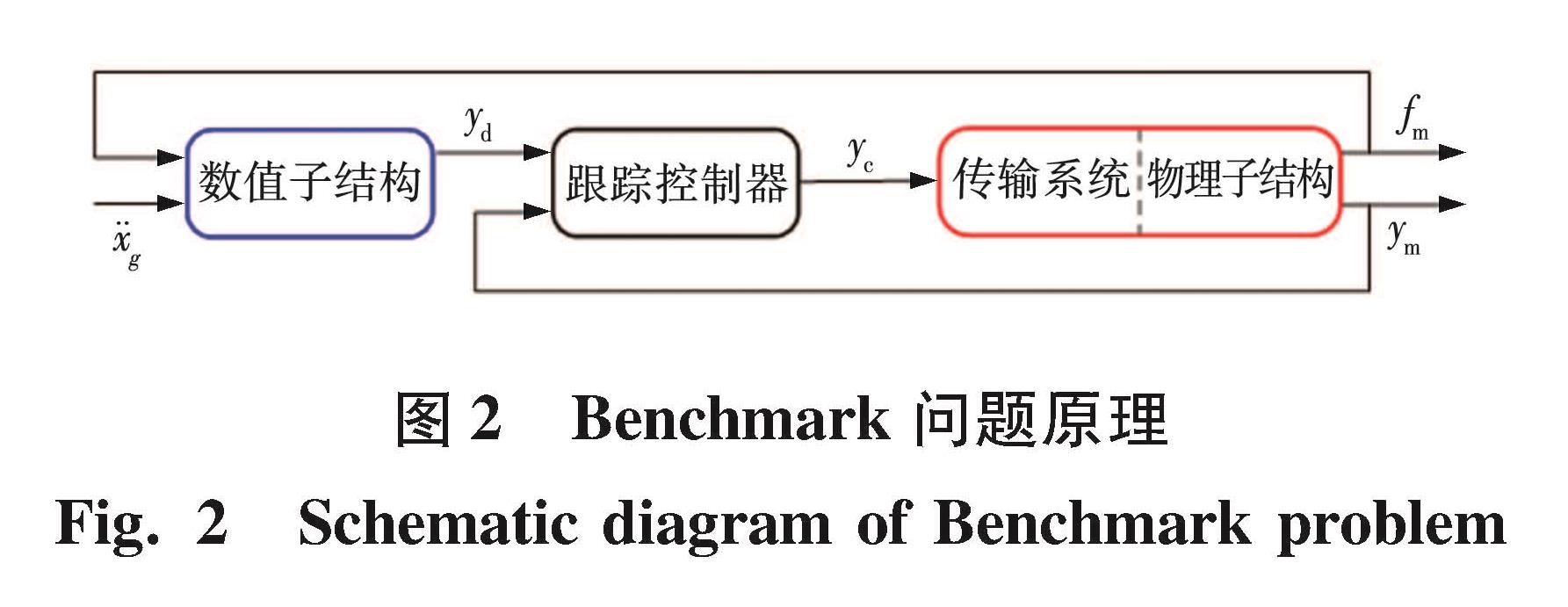
图2 Benchmark问题原理
Fig.2 Schematic diagram of Benchmark problem
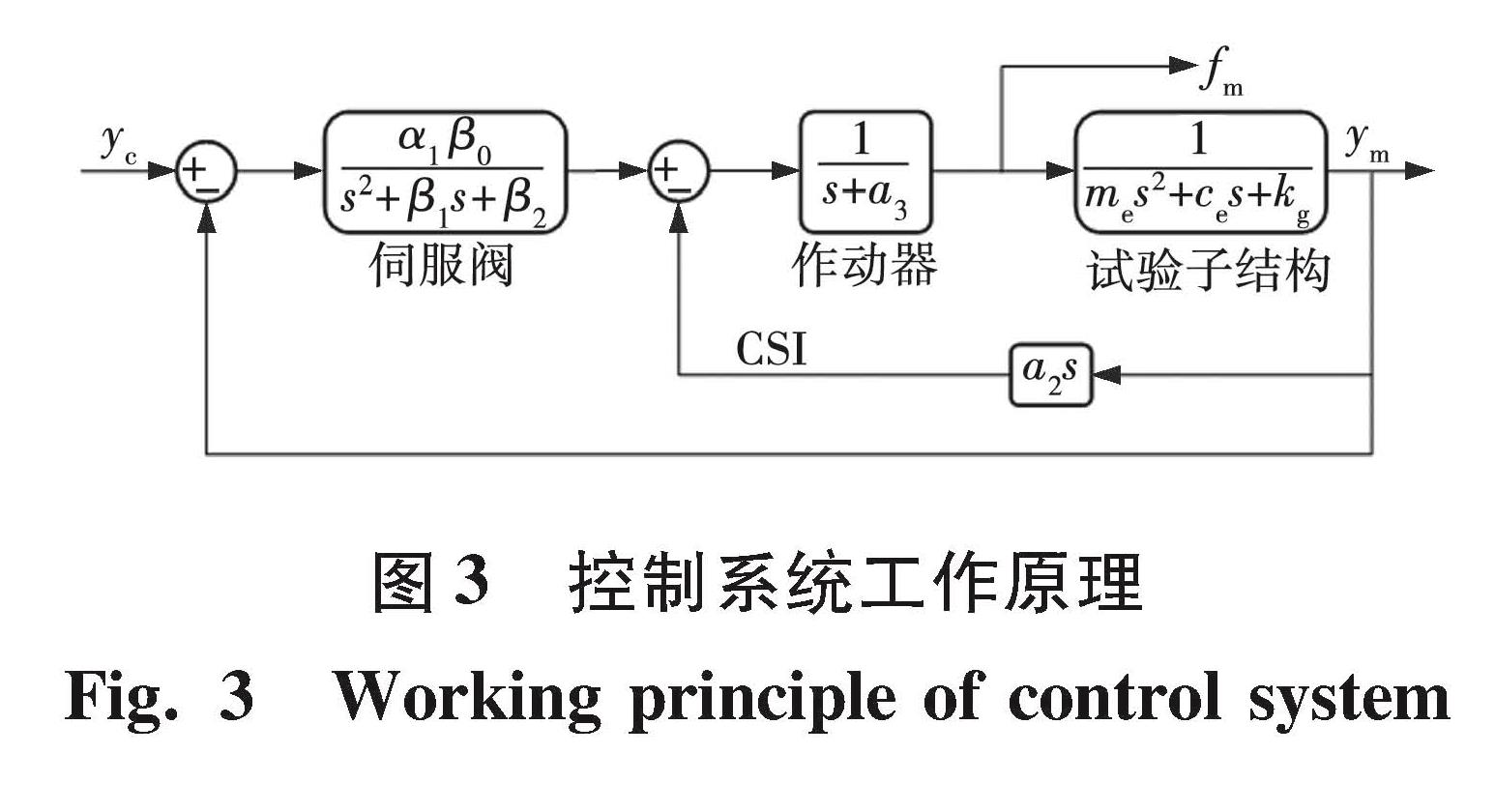
图3 控制系统工作原理
Fig.3 Working principle of control system
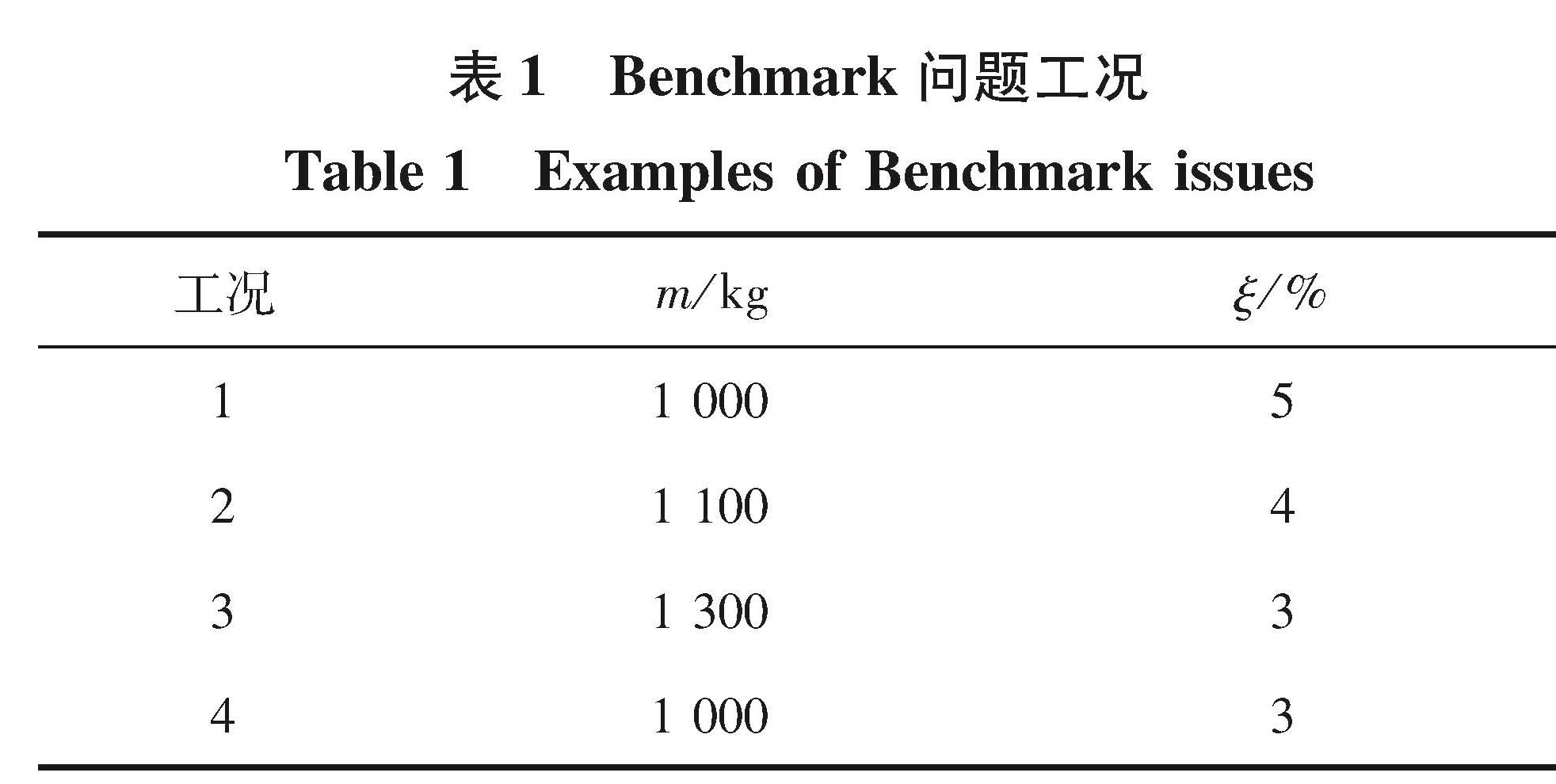
考虑到试验子结构与数值子结构不同划分方式会对RTHS补偿精度和稳定性产生影响,Benchmark问题根据参考模型层阻尼比ξ和对应质量m给出了4种结构工况,详见表1。每种工况考虑了El Centro、Kobe和Morgan Hill等3种地震动记录。
表1 Benchmark问题工况
Table 1 Examples of Benchmark issues
2.2 评价准则
为了定量评价RTHS时滞补偿效果,Benchmark问题给出了9个评价指标,即J1~J9。J1~J3用于评价补偿器的追踪性能,剩余6个指标用于评估补偿器的综合性能。结构楼层数使用评价指标公式中圆括号的上标k表示。一层的试验子结构实测位移ym可知,在试验子结构位移相对误差和位移峰值误差中均采用实测位移ym替换期望位移yd。
评价指标J1为系统时滞,可表达为

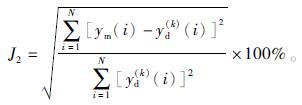
J2为位移均方根误差,计算表达式为
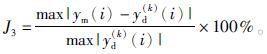
J3为位移峰值追踪误差,可表示为
评价指标J4~J6分别表示一层、二层、三层的试验子结构位移相对误差,表示为
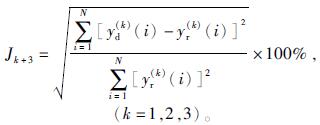
评价指标J7~J9分别表示一层、二层、三层的试验子结构位移峰值误差,表示为
采用UKF-ADC方法对系统进行时滞补偿,实时混合试验流程如下:
(1)选定积分步长Δt,确定系统初始状态均值X0和初始状态协方差阵P0。
(2)在第i积分步采用UKF在线识别系统模型参数,通过自适应补偿得到命令位移yc,i。
(3)将命令位移yc,i传输给伺服系统,通过伺服作动器对试验子结构进行加载,测得试验子结构的实测位移ym,i及反力fm,i并反馈给数值子结构。
(4)利用4阶Runge-Kutta逐步积分算法求解运动方程,得到下一步的期望位移yd,i+1。
(5)令i=i+1,返回第(2)步,直到试验结束。
3 数值模拟文中采用RTHS的Benchmark问题进行补偿计算。考虑了El Centro地震记录和工况1~4四种工况,其中,参考位移为系统未考虑时滞影响的情况下进行实时混合试验得到的结构位移响应。
以El Centro地震记录工况3为例开展实时混合试验,首先分析无时滞补偿时,系统时滞对试验结果的影响,如图4所示。由图4a可知,时滞的存在使得实测位移不断放大,导致实验结果发散,严重影响实验的安全。由图4b可知,未经过补偿的测量位移与期望位移有明显的相位滞后,同参考位移有较大的差异。图5中测量位移-期望位移曲线不断偏离斜率为1的直线,最终形成不规则的椭圆曲线。表明了开展有效的时滞补偿对试验结果至关重要。
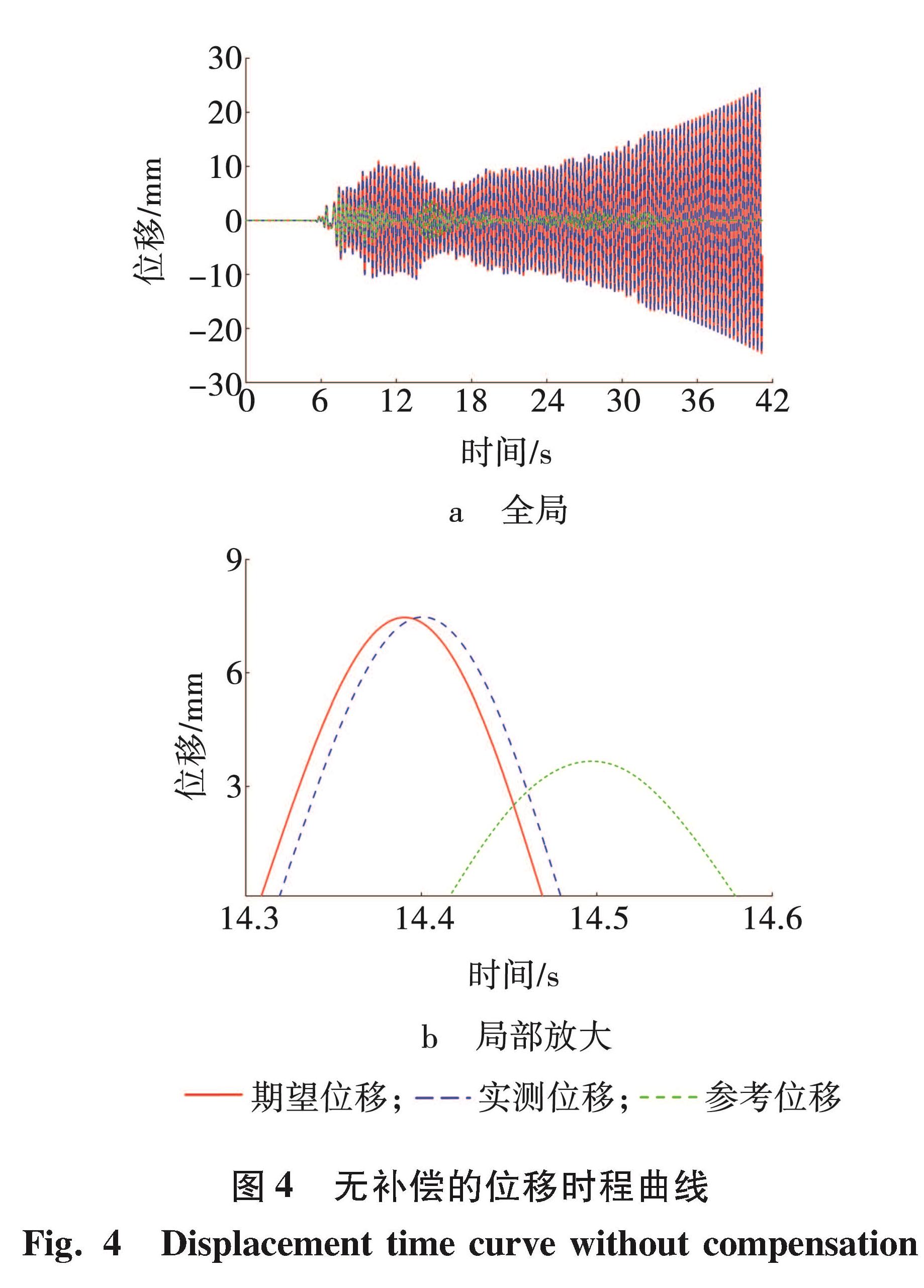
图4 无补偿的位移时程曲线
Fig.4 Displacement time curve without compensation
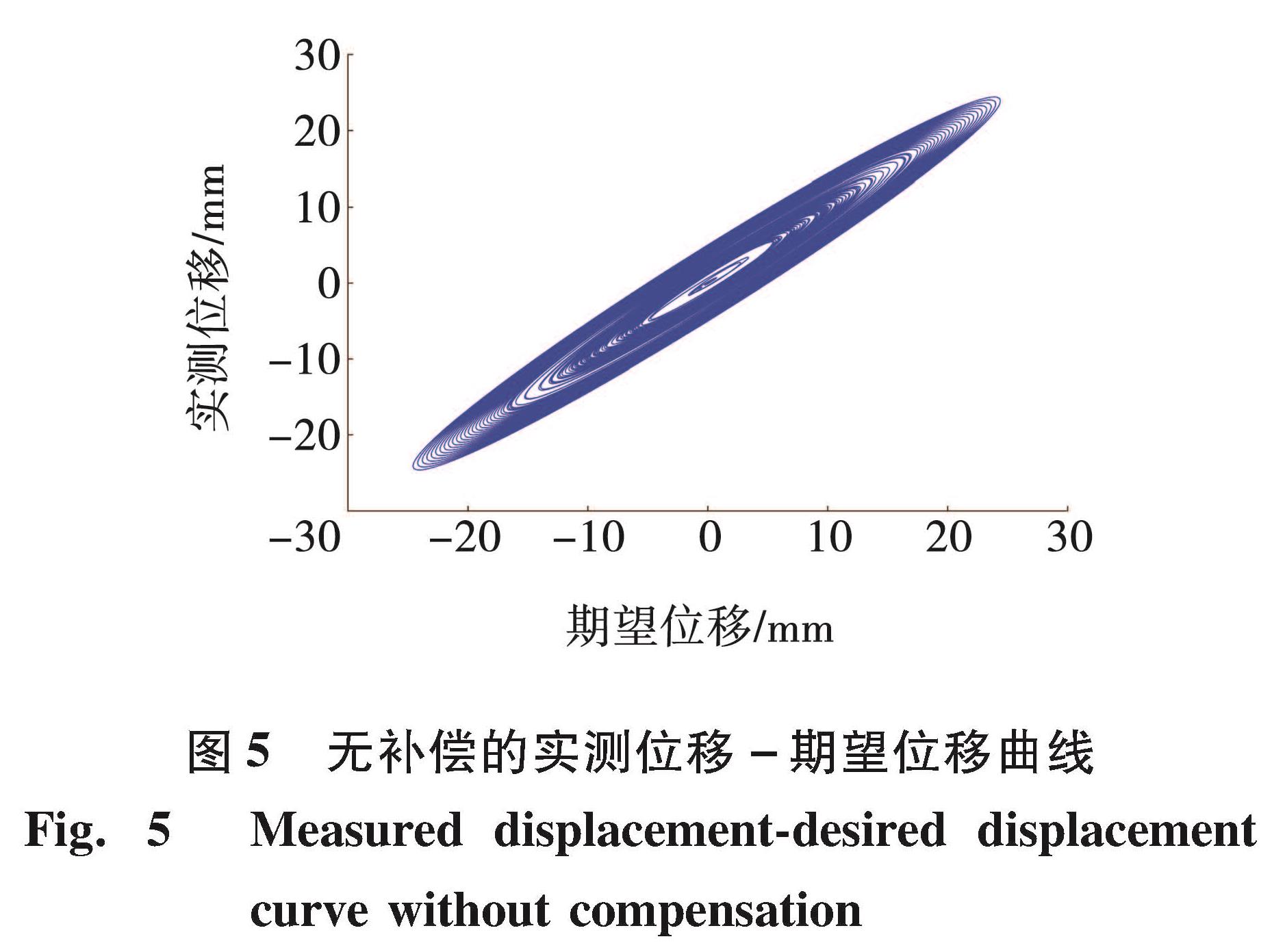
图5 无补偿的实测位移-期望位移曲线
Fig.5 Measured displacement-desired displacement curve without compensation
为解决系统时滞给试验结果带来的不利影响,本文采用UKF-ADC方法对系统进行补偿。按照名义值(Nominal)和标准差(STD)两种统计算法对评价指标J1~J9进行分类计算。STD表示在伺服系统中加入扰动因子额外模拟20次计算得到的评价指标标准差; Nominal表示伺服系统未考虑扰动因子的影响,一般情况下的计算结果。
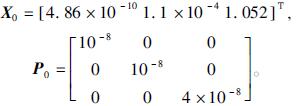
文中综合考虑时滞补偿精度和稳定性,时滞补偿方法步长选取30倍系统采样步长; 前期离线试验估计得到系统时滞为τ=10.3 ms; PI控制器参数取Kp=1.83和Ki=94; UT变换作为UKF算法Sigma点的选取依据,γ跟协方差阵的正半定性密切相关,α控制Sigma点的分布范围,一般选一个较小正数,β是一个非负的权重系数,文中UT变换的参数设置为α=0.001,β=2,γ=0; 系统模型参数初始状态均值X0和初始状态协方差阵P0分别为
测量噪声协方差矩阵R和过程噪声协方差矩阵Q分别为
UKF-ADC方法补偿后的位移时程曲线,如图6所示。
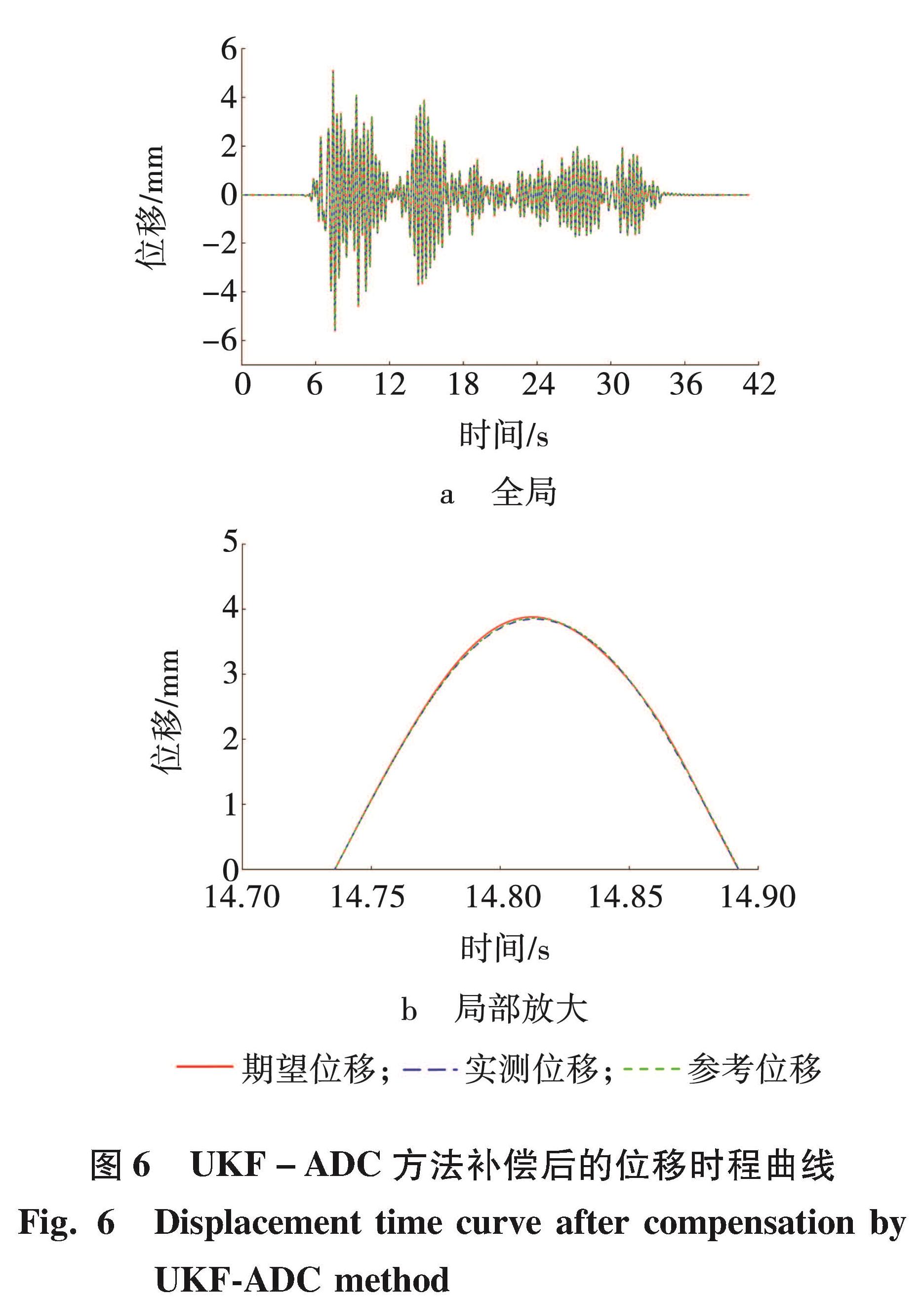
图6 UKF-ADC方法补偿后的位移时程曲线
Fig.6 Displacement time curve after compensation by UKF-ADC method
由图6可知,实测-期望-参考位移时程曲线能较好地贴合,可以有效解决系统时滞效应给试验带来的负面影响。
经过UKF-ADC补偿后的实测位移追踪性能明显提升,实测位移-期望位移曲线基本呈现斜率为1的一次直线,实现了对系统时滞有效补偿,如图7所示。
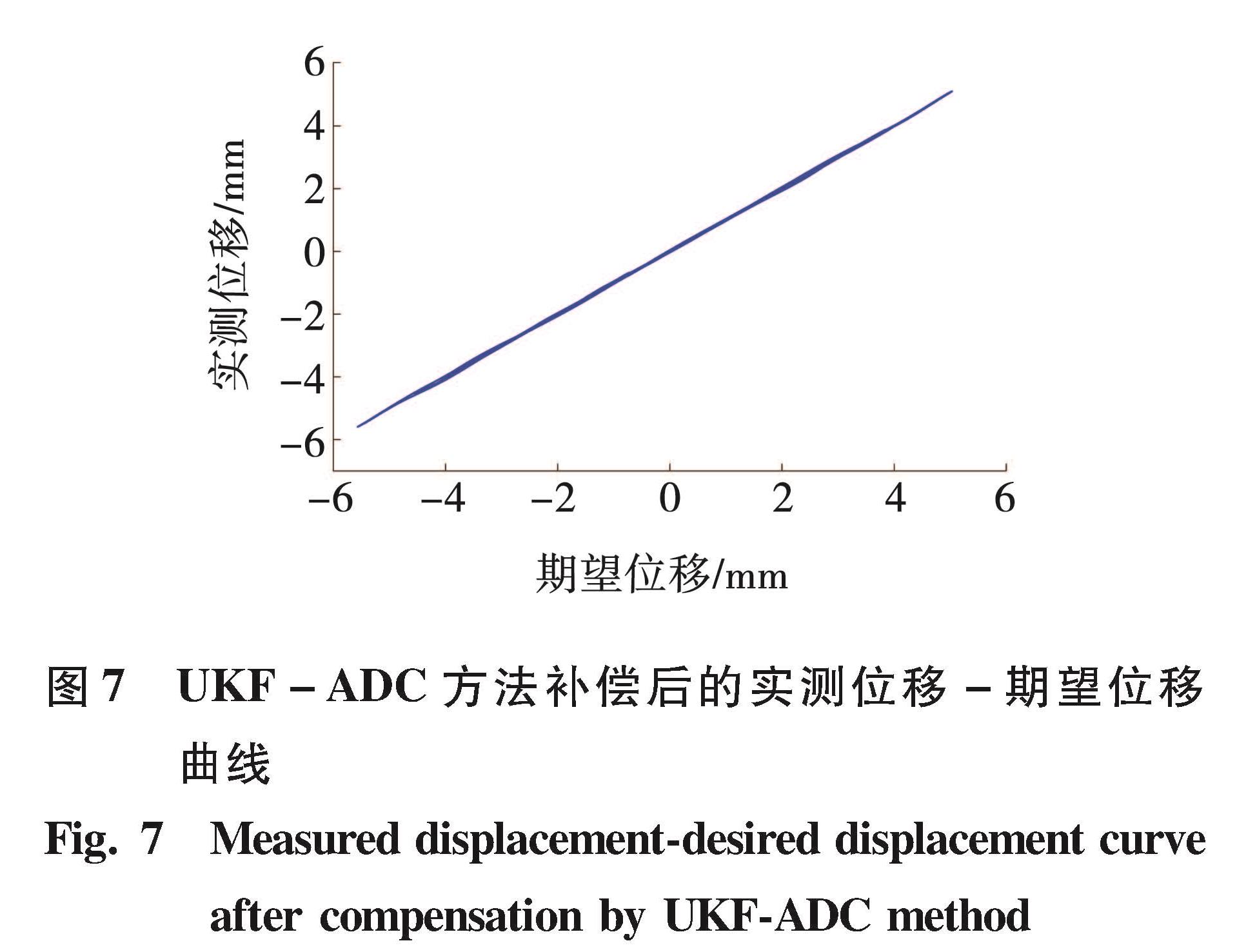
图7 UKF-ADC方法补偿后的实测位移-期望位移曲线
Fig.7 Measured displacement-desired displacement curve after compensation by UKF-ADC method
为了进一步验证UKF-ADC方法的性能,分别采用多项式外插算法(Polynomial extrapolation,PE)和UKF-ADC方法开展实时混合试验,对比分析试验补偿效果。RTHS考虑了Benchmark模型提供的3种地震记录和4个子结构划分工况,每种工况都执行20次带有扰动系统参数的模拟,以考虑补偿方法的鲁棒性; 并使用标称系统参数进行一次运行,以验证补偿方法的精度。分别按照名义值(Nominal)和标准差(STD)对试验精度和鲁棒性进行计算。
Nominal统计算法和STD统计算法下的评价指标计算结果分别如图8、9所示。图8给出了Nominal统计算法下工况1~工况4的评价指标计算结果eN。整体上分析,两种补偿方法随工况1~工况4的补偿难度提升,计算误差不断增大,在工况4中达到最大值。其中,PE方法计算出的评价指标最大值为J4=4.21%、J5=3.97%、J6=3.98%,而通过UKF-ADC方法补偿得到的指标数值为J4=3.17%、J5=2.50%、J6=2.51%。相比于PE方法,在工况1~工况4中UKF-ADC方法得到的评价指标最大值分别减小了28.25%、27.38%、23.72%和24.70%,指标数值明显减小,有效提高了实时混合试验的综合补偿能力。
STD统计算法下的评价指标计算结果es如图9所示。PE方法基于定时滞假定,未考虑系统额外扰动给试验结果带来的不利影响,4种工况中计算得到的评价指标标准差的最大值分别为0.93%、0.59%、0.79%和1.38%,额外模拟20次的指标差异较大,难以满足补偿的鲁棒性要求; 而UKF-ADC方法可以通过参数在线更新实时估计系统状态,更能真实地反映出系统的时滞特性,补偿结果更加合理,评价指标的最大标准差分别减小了16.13%、55.93%、26.58%和8.70%,有效提升了试验的鲁棒性。
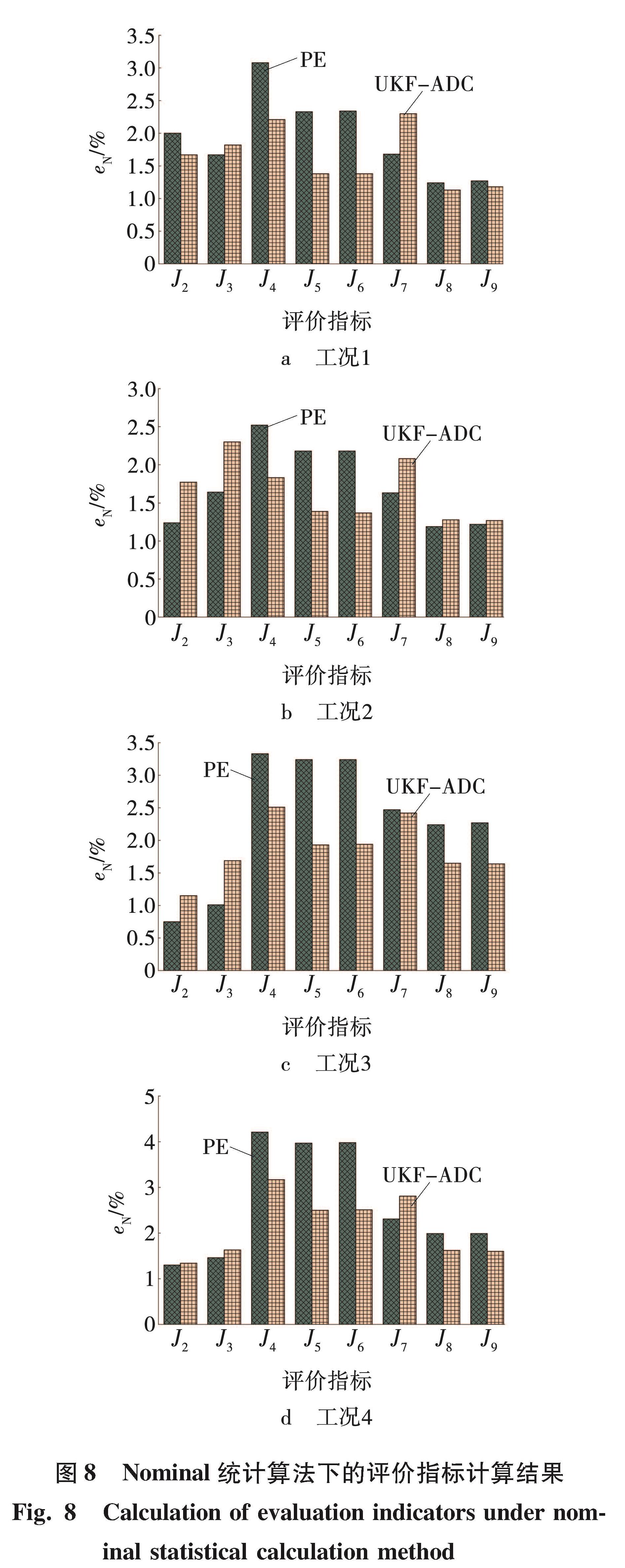
图8 Nominal统计算法下的评价指标计算结果
Fig.8 Calculation of evaluation indicators under nominal statistical calculation method
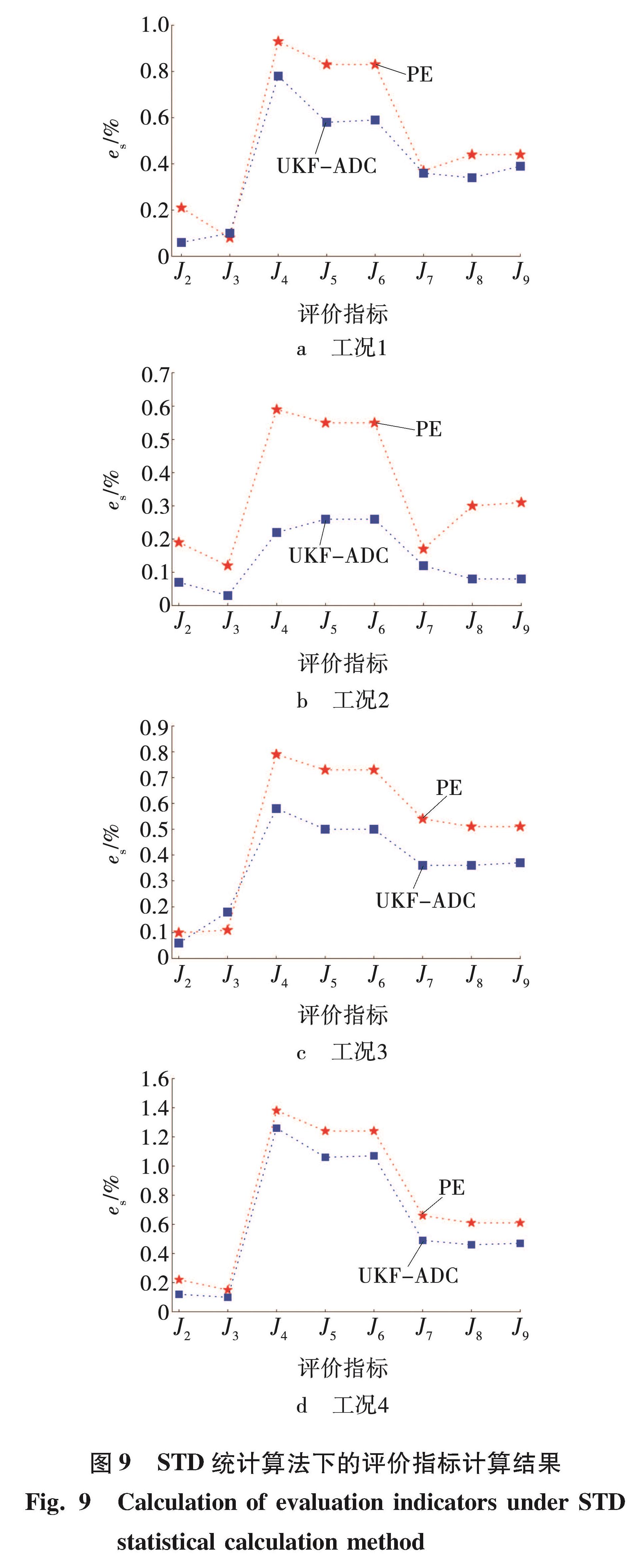
图9 STD统计算法下的评价指标计算结果
Fig.9 Calculation of evaluation indicators under STD statistical calculation method
5 结 论
(1)在RTHS中,首先分析了系统时滞对试验结果的影响,提出了UKF-ADC时滞补偿方法。采用补偿后的实测位移和期望位移与参考时程曲线能较好吻合,验证了UKF-ADC方法的有效性。
(2)与传统PE方法相比,UKF-ADC方法在Benchmark问题工况1~4中的Nominal指标最大值分别减小了28.25%、27.38%、23.72%和24.70%,提高了实时混合试验的综合补偿精度; STD评价指标最大值分别减小了16.13%、55.93%、26.58%和8.70%,有效提升了试验的鲁棒性。
- [1] Nakashima M, Kato H, Takaoka E. Development of real-time pseudo dynamic testing[J]. Earthquake Engineering and Structural Dynamics, 1992, 21(1): 79-92.
- [2] Horiuchi T, Inoue M, Konno T, et al. Real-time hybrid experimental system with actuator delay compensation and its application to a piping system with energy absorber[J]. Earthquake Engineering & Structural Dynamics, 1999, 28(10): 1121-1141.
- [3] Chen C, Ricles J M. Improved adaptive inverse compensation technique for real-time hybrid simulation[J]. Journal of Engineering Mechanics, 2012, 138(12): 1432-1446.
- [4] Chae Y, Kazemibidokhti K, Ricles J M. Adaptive time series compensator for delay compensation of servo-hydraulic actuator systems for real-time hybrid simulation[J]. Earthquake Engineering & Structural Dynamics, 2013, 42(11): 1697-1715.
- [5] Zhou H, Xu D, Shao X, et al. A robust linear-quadratic-gaussian controller for the real-time hybrid simulation on a benchmark problem[J]. Mechanical Systems and Signal Processing, 2019, 133: 106260.
- [6] Strano S, Terzo M. Actuator dynamics compensation for real-time hybrid simulation: an adaptive approach by means of a nonlinear estimator[J]. Nonlinear Dynamics, 2016, 85(4): 2353-2368.
- [7] Ning X, Wang Z, Wu B. Kalman filter-based adaptive delay compensation for benchmark problem in real-time hybrid simulation[J]. Applied Sciences, 2020, 10(20): 7101.
- [8] 王 贞, 李 强, 吴 斌. 实时混合试验的自适应时滞补偿方法[J]. 工程力学, 2018, 35(9): 37-43.
- [9] 王 涛, 郑 欢, 王 贞. 黏滞阻尼器高频响应下的自适应时滞补偿设计[J]. 黑龙江科技大学学报, 2021, 31(1): 110-114.
- [10] 李 宁, 周子豪, 李忠献. 基于时滞追踪的实时混合试验自适应补偿方法[J].工程力学, 2019, 36(7): 38-47.
- [11] Silva C E, Gomez D, Maghareh A, et al. Benchmark control problem for real-time hybrid simulation[J]. Mechanical Systems and Signal Processing, 2020, 135: 106381.
- [12] Carrion J E. Model-based strategies for real-time hybrid testing[M]. Urbana-Champaign: University of Illinois at Urbana-Champaign, 2007.
- [13] 王 涛, 吴 斌. 基于UKF模型更新的混合试验方法[J]. 振动与冲击, 2013, 32(5): 138-143.